|
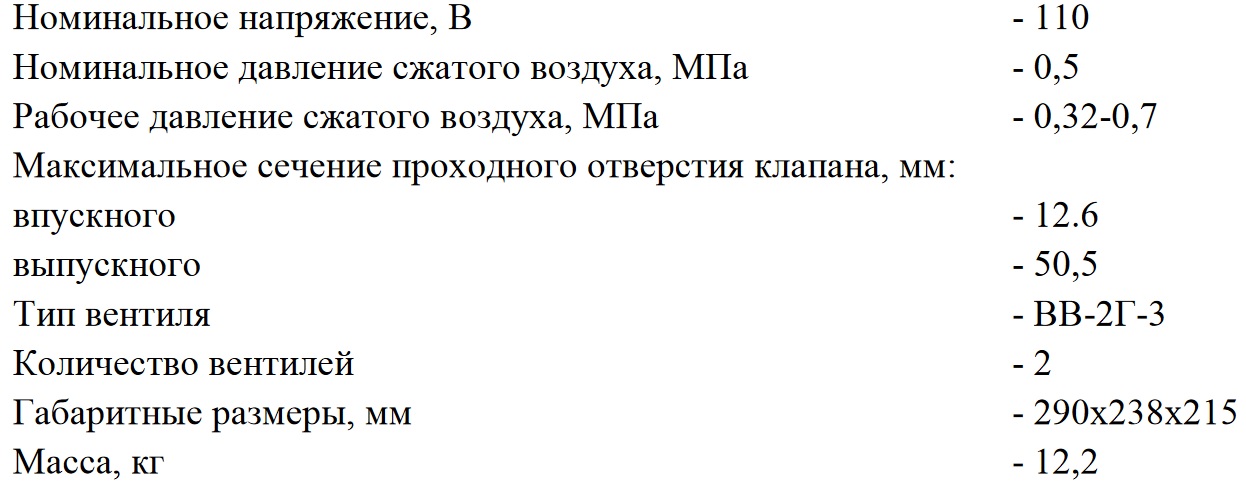
Технические характеристики токоприемника
Общий вид токоприемника
1 - основание; 2 - рама нижняя; 3 - рама верхняя; 4 - штанга 6 - пневморессора; 7 - полоз; 8 - тяга подъема (трос); 9 - тяга верхняя; 10 - тяга нижняя; 11 - кронштейн; 12 - площадка; 13, 14 - шунты; 17, 18 - подшипник 13 - шунт; 16 - болт; 19 - держатель (каретка); 21 - втулка; 22 - вилка; 63 - гайка; 30, 100 - буфер резиновый; 91 - регулятор давления; 94 - штуцер; 95 - гайка накидная.
Схема пневмоэлектрическая принципиальная контроля состояния токоприемника
Таблица состояния контактов реле давления
Контакты пневматических реле Р1, Р2 представляют собой «сухой контакт» нагрузочные параметры которого:
- ток не более 0,2 А (для P2) и 0.5А (для P1);
- уровень изоляции 1500 В.
Описание токоприемника
Токоприемник ЛА19-21-СЭТ 155 800 предназначен для передачи тока до 800А при движении и до 100А на стоянке, от контактной сети к электрооборудованию ЭПС и наибольшей допустимой скоростью 155 км/ч.
Токоприемник состоит из следующих частей:
- основания;
- системы подвижных рам;
- механизма подъема;
- узла верхнего.
Токоприемник представляет собой конструкцию, выполненную по схеме ассиметричного полупантографа. Подъем ТП осуществляется с помощью механизма подъема, управляемого блоком управления, опускание – за счет собственного веса системы подвижных рам и узла верхнего.
Все узлы и агрегаты ТП расположены на основании 1, которое крепится на опорные изоляторы на крыше моторного вагона.
Систему подвижных рам составляют: рама нижняя 2, рама верхняя 3, тяга нижняя 10 и тяга (тяга верхняя) 9.
Рама нижняя 2 соединяется с основанием 1 и рамой верхней 3 подшипниковыми узлами 18.
Механизм подъема состоит из двух тяг (тросов) подъема 8 и пневморессоры 6, управляемой регулятором давления 91, которая одним концом связана через кронштейн пневморессоры 11, посредством тросов 8, с нижней рамой 2, а другим жестко закреплена через кронштейн на основании 1.
Узел верхний состоит из штанги в сборе 4 и полоза 7. Штанга в сборе 4 установлена в поперечине верхней рамы 3 и через рычаг соединена с тягой верхней 9. Электрическая связь верхнего узла с системой подвижных рам осуществляется шунтами 13, 14, крепящимися к полозу.
Электрическая связь рамы нижней 2 с основанием 1 и верхней рамой 3 осуществляется шунтами 13.
Система контроля состояния токоприемника Токоприемник активируется (на подъем) путем подачи сжатого воздуха к токоприемнику от магистрали М через магистраль А. При этом сжатый воздух подается на Р1, что приводит к замыканию контактов 1 и 3 на ХТ1.
Далее сжатый воздух поступает на регулятор давления РД1, после которого редуцированный по уровню давления обеспечивает подъем токоприемника посредством пневморессоры ПР.
При подъеме токоприемника и работе его в рабочей зоне, происходит срабатывание ПР1, в результате чего, сжатый воздух поступает по магистрали Б на Р2, что приводит к замыканию контактов 2 и 4 на ХТ1.
|