
ЭС2Г. Токоприемник ЛА 19-СЭТ 160 1200
| ЭС2Г. Токоприемник ЛА 19-СЭТ 160 1200 |
|---|
Технические характеристики
Устройство токоприемника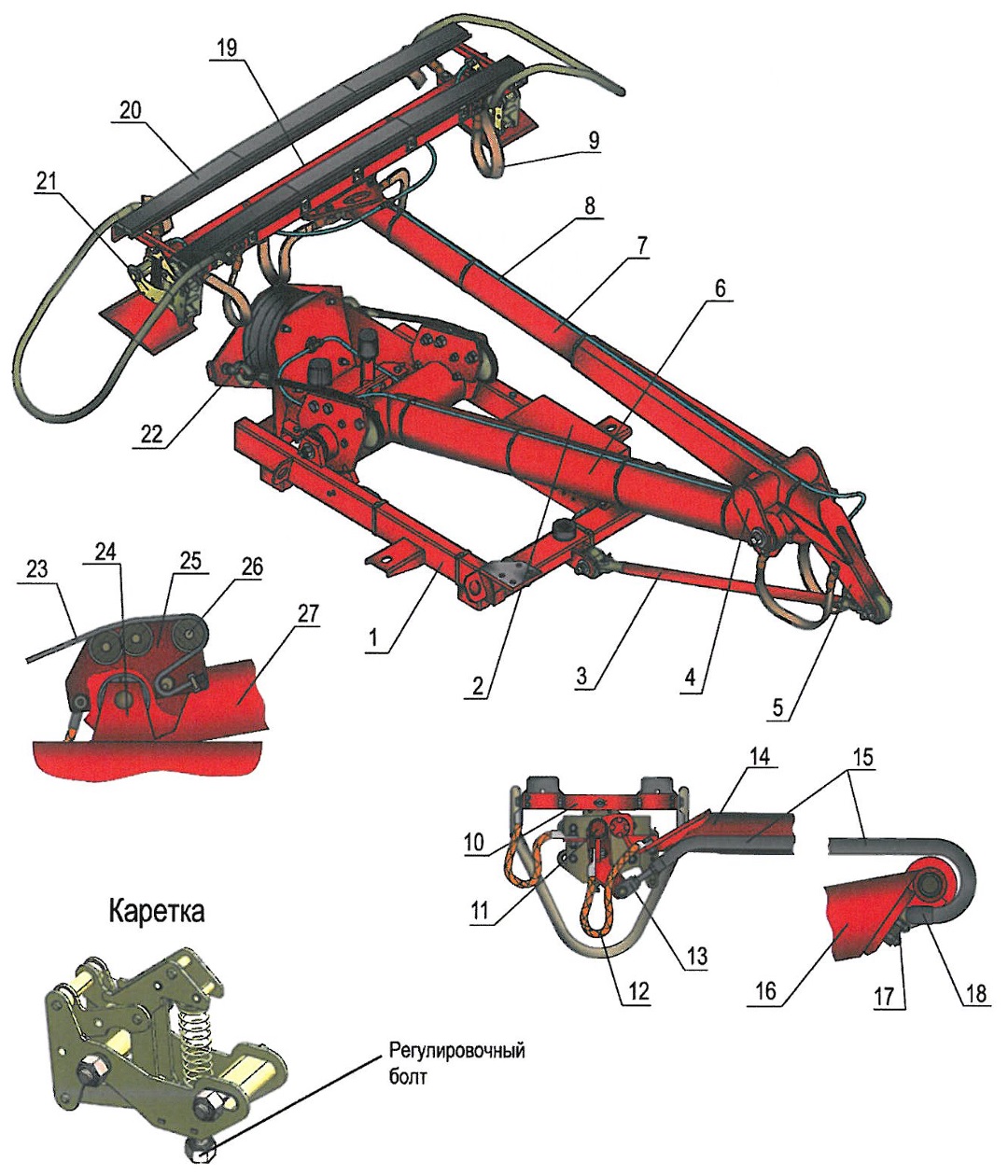
1 - основание; 2 - пневматический модуль; 3 - тяга нижняя; 4, 25 - щека; 5 - рычаг; 6, 16, 27 - рама нижняя; 7, 14 - рама верхняя; 8 - воздухопровод; 9, 12 - шунт соединительный; 10 - полоз; 11, 19 - тяга продольная; 13 - вилка верхней тяги; 15 - тяга верхняя; 17 - колодка; 18 - вилка верхней тяги; 20 - накладка; 21 - каретка; 22 - пневморессора; 23 - подъемный трос; 24 - кронштейн основания; 26 - ролик.
Токоприемник представляет собой конструкцию, выполненную по схеме асимметричного полупантографа. Подъем токоприемника осуществляется при помощи пневматического привода, опускание - за счет собственного веса системы подвижных рам и верхнего узла. Токоприемник состоит из следующих частей: - основания; - системы подвижных рам; - механизма подъема; - узла верхнего. Все узлы и агрегаты токоприемника расположены на основании, которое на опорных изоляторах устанавливается на крыше вагона электропоезда. Систему подвижных рам включает в себя нижние и верхние рамы, и тяги. Рама нижняя соединяется подшипниковыми узлами с основанием и рамой верхней. Механизм подъема состоит из пневморессоры, которая одним концом, через кронштейн, посредством двух подъемных тяг (тросов) связана с нижней рамой, а другим жестко закреплена на кронштейне основании. Узел верхний состоит из штанги и полоза. Штанга установлена в поперечине верхней рамы и через рычаг соединена с тягой верхней. Электрическая связь узла верхнего с системой подвижных рам и основание осуществляется гибкими шунтами. Основание токоприемника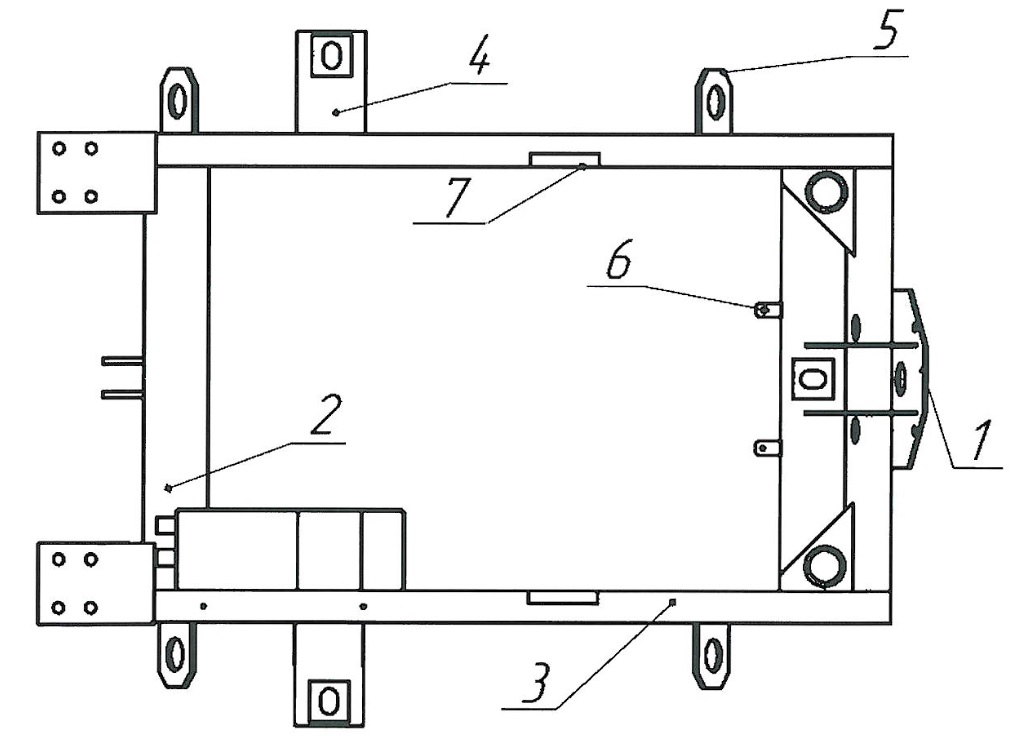
1 - кронштейн; 2 - поперечная балка; 3 - продольная балка; 4 - опора; 5 - рым; 6 - клемма; 7 - стойка.
Основание предназначено для монтажа всех систем и механизмов токоприемника и крепления токоприемника к опорным изоляторам, установленным на крыше электропоезда. Основание представляет собой раму, сваренную из стальных труб прямоугольного сечения (две продольные балки; две поперечные балки и две опоры). На основании имеются кронштейн для установки пневморессоры и две стойки для шарнирного крепления нижней рамы. К продольным балкам приварены рымы для строповки токоприемника при выполнении монтажно-демонтажных работ. На одной из поперечных балок имеется две клеммы, предназначенные для крепления шунтов, обеспечивающих электрическое соединение основания с рамой нижней. Рама нижняя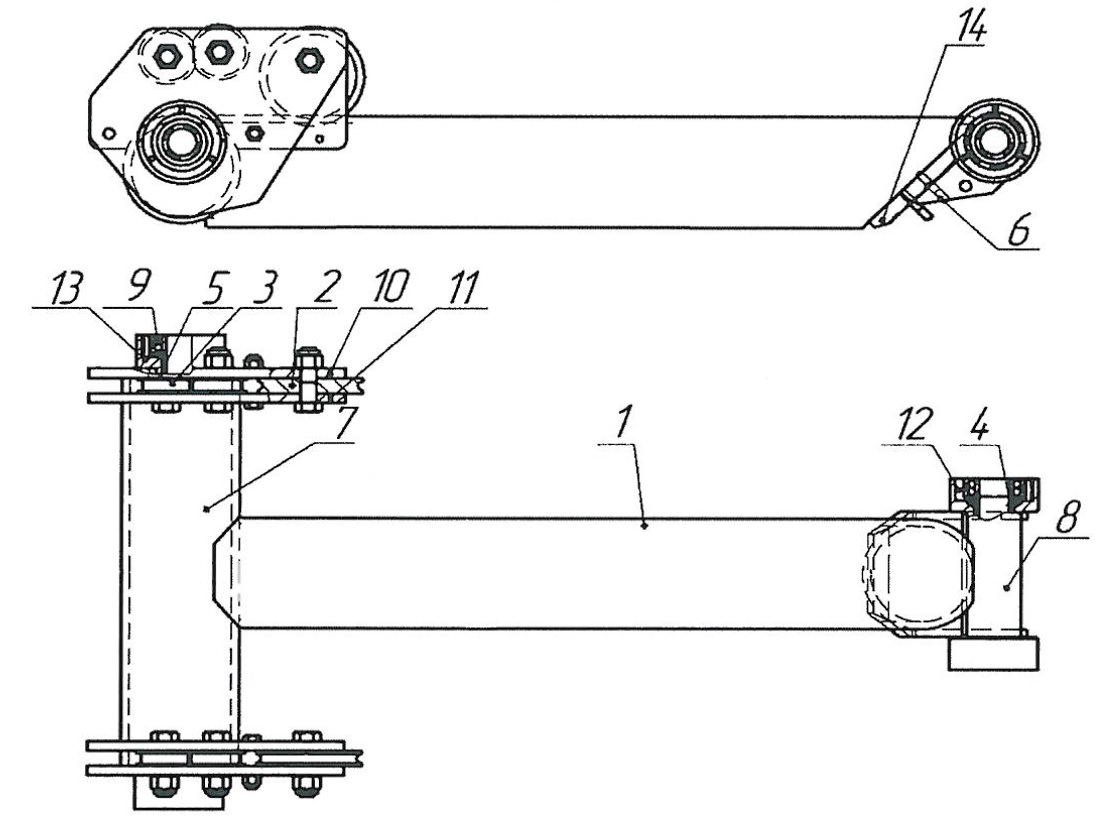
1 - балка; 2, 3 - ролики; 4, 5 - втулки; 6 - шпилька; 7 - поперечина нижняя; 8 - поперечина верхняя; 9 - подшипник; 10, 11 - щеки; 12, 13 - обоймы подшипников; 14 - колодка.
Система подвижным рам предназначена для подъема верхнего узла из сложенного положения до контактного провода и восприятия действующих на верхний узел продольных узел продольных и поперечных нагрузок. Она состоит из рамы нижней, рамы верхней, тяги нижней и тяги верхней. Нижняя и верхняя рама представляют собой сварные конструкции из труб и деталей, изготовленных из алюминиевого сплава. Нижняя рама состоит из балки и двух поперечин (нижней и верхней). На нижней поперечине, с каждой стороны имеется по две щеки, между которыми установлены ролики. В основании каждой поперечины имеется две обоймы, в выточке которых запрессованы стальные втулки для установки подшипников. Через втулки и подшипники рама нижняя крепится на основании и соединяется с рамой верхней. Для установки кронштейна верхней тяги используется колодка с двумя ввернутыми шпильками. В зависимости от исполнения пневморессоры, используются два варианта роликов большего диаметра - диаметром 100 мм (до токоприемника №271) или 120 мм (с токоприемника №272). Рама верхняя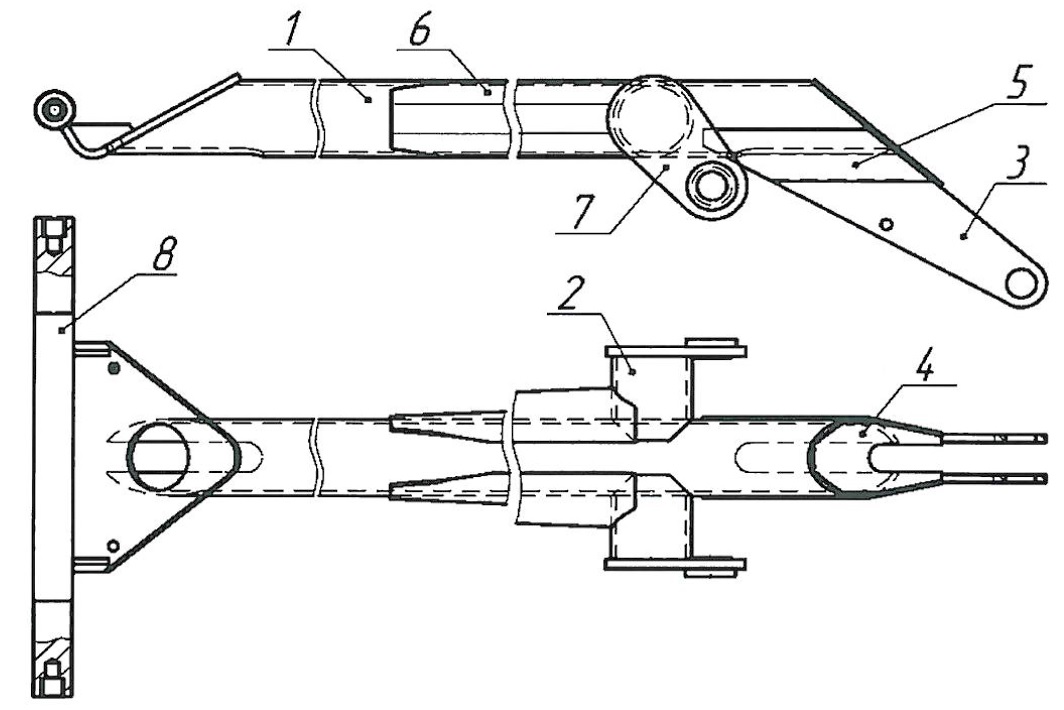
1 - стрела; 2 - консоль; 3 - рычаг; 4 - затыльник; 5 - укосина; 6 - накладка; 7 - щека; 8 - поперечина.
Рама верхняя состоит из поперечины, на которую устанавливается верхний узел токоприемника; стрелы, усиленной накладками; двух щек, расположенных на консолях и предназначенных для шарнирного соединения верхней с нижней рам; рычага с затыльником и укосинами. Через отверстие рычага верхняя рама соединяется с тягой нижней. Рама верхняя устанавливаемая на токоприемники до №271 имеет длину на 20 мм больше, чем длина рамы верхней, устанавливаемой на токоприемники с №272. Тяга нижняя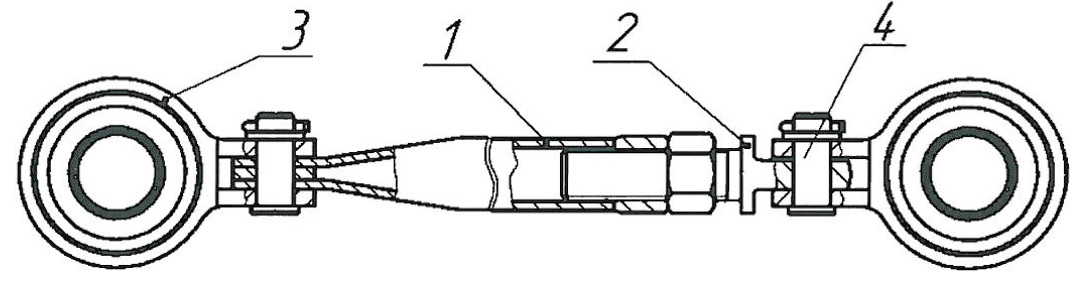
1 - штанга; 2 - петля; 3 - корпус; 4 - палец.
Тяга нижняя предназначена для обеспечения заданной траектории подъема верхнего узла и состоит из штанги, в один конец которой ввернута петля, и двух корпусов для подшипников, соединенными с петлей и вторым концом штангой пальцами. Через один корпус тяга нижняя соединена с верхней рамой, а через второй - с основанием. Тяга верхняя
1 - стальная труба; 2, 5 - вилка; 3 - контргайка; 4 - бобышка.
Тяга верхняя предназначена для удержания верхнего узла в строго горизонтальном положении при работе токоприемника. Она представляет собой изогнутую стальную трубу с вилкой на одном конце и резьбовой бобышкой на другом. В резьбовую бобышку ввернута вилка с контргайкой. Соединение тяги верхней с нижней рамой и вилки с рычагом штанги верхнего узла осуществляется через втулки, зажатые гайками и установленные на подшипниках скольжения, запрессованных в рычаг штанги. Тяга верхняя устанавливаемая на токоприемники до №271 имеет длину на 20 мм больше, чем длина тяги верхней, устанавливаемой на токоприемники с №272. Верхний узел и каретка
1 - штанга; 2 - тяга верхняя; 3, 4 - шунты; 5 - накладка; 6 - полоз; 7 - кронштейн полоза; 8 - серьга; 9 - верхняя планка; 10 - ось; 11 - пружина; 12 - поперечный валик; 13 - болт регулировочный; 14 - основание каретки.
Механизм подъема предназначен для подъема с помощью системы подвижных рам верхнего узла и прижатия полоза к контактному проводу с заданным усилием в рабочем диапазоне. Механизм подъема включает в себя пневморессору с регулятором давления и две подъемные тяги (тросы). Один конец каждого из тросов соединен с кронштейном пневморессоры, а другой закреплен на щеке нижней рамы болтами с гайками и шайбами. Управление пневморессорой выполняется посредством регулятора давления. Верхний узел предназначен для съема тока с контактного провода и дополнительно подрессоривания полоза относительно конца верхней подвижной рамы. Он состоит из штанги и полоза. Штанга является основной несущей частью верхнего узла. В качестве демпфирующих элементов используются каретки. На каретках установлен полоз. Полоз двумя кронштейнами установлен на каретках и закреплен при помощи калиброванного пустотелого валика, к которому подведена магистраль сжатого воздуха "В". При подъеме, полоз токоприемника упирается в контактный провод, пружины кареток сжимаются на величину от 30 до 50% от их полного перемещения. При динамическом возрастании нагрузки на полоз, пружины кареток сжимаются, а их жесткость возрастает. Пределы изменения жесткости пружин кареток выбраны так, что при наибольших динамических нагрузках на полоз со стороны контактного провода, замыкания подвижной и неподвижной частей кареток не происходит. Изменение пределов жесткости пружины каретки осуществляется регулировочным болтом. Пневматический и электропневматический модуль токоприемника
Пневматический модуль токоприемников до №296
1 - регулятор давления IR2010-F02-L; 2 - коллектор 3053 3/8-3L-1/4; 3 - пневмодроссель RFO-344-1/4. 
Пневматический модуль токоприемников с №297
1 - коллектор 3053 3/8L-1/4; 2 - пневмодроссель RFO-344-1/4. Пневматический модуль устанавливается на раме токоприемника. На токоприемниках до №296 он включает в себя регулятор давления IR2010-F02-L, пневмодроссель RFO-344-1/4, коллектор 3053 3/8-3L-1/4 и три штуцера подвода воздуха из магистралей "A", "C" и "Б". На токоприемниках с №297 регулятор давления перенесен с пневматического модуля на блок электропневматических приборов. 
Пневмодроссель игольчатого типа, без обратного клапана RFO-344-1/4 предназначен для регулировки расхода воздуха и скорости наполнения сжатым воздухом пневморессоры. Регулировка пневмодросселя производится винтом. Действует в обоих направлениях.

Коллектор на три выхода типа 3053 3/8-3L-1/4 обеспечивает распределение потоков сжатого воздуха.

Блок электропневматический для токоприемников до №296
1 - реле давления типа РМ11-NA; 2 - реле давления типа РМ11-NC; 3 - распределитель типа 638-150 с глушителем. 
Блок электропневматический для токоприемников с №297
1 - регулятор давления типа IR2010-F02-L (IR2020-F02-L); 2 - регулятор давления типа PR104-M-04-S01. Блок электропневматический установлен в потолочном пространстве кузова вагона и предназначен для управления работой токоприемника, и состоит из пневматических, электропневматических и электрических компонентов и соединительных элементов. Блок управляет подачей воздуа к пневматическому модулю токоприемнику и формирования электрических сигналов аварийного состояния токоприемника. Блок установлен в кузове вагона. Блок электропневматический токоприемников до №296 состоит из: - пневмораспределителя типа 638-150 с глушителем; - реле давления типа РМ11-NA; - реле давления типа РМ11-NC. На блоках электропневматических токоприемников №297-302 введен регулятор давления типа IR2010-F02-L (IR2020-F02-L), а токоприемников с №303 - PR104-M-04-S01. Пневмораспределитель типа 638-150 и реле давления типа РМ11-NA и типа РМ11-NC остались без изменений. Блоки электропневматические с регуляторами давления типа IR2010-F02-L (IR2020-F02-L) или PR104-M-04-S01 взаимозаменяемые. 
Электропневматический распределитель прямого действия типа 638-150, нормально закрытый, предназначен для управления подачей сжатого воздуха к пневматическому модулю токоприемника при получении электрического сигнала от системы управления.

Регулируемое реле давления РМ11-NA (P2) с нормально разомкнутым электрическим контактом предназначено для подачи сигнала в систему управления электропоездом информации об изломе верхнего узла токоприемника. Электрический контакт замыкается, когда давление достигает требуемого значения. При отсутствии заданного давления контакты реле разомкнуты. Требуемое значение давления устанавливается регулировочным винтом.

Регулируемое реле давления РМ11-NC (P1) с нормально замкнутым электрическим контактом предназначено для подачи сигнала в систему управления электропоездом информации о превышении высоты подъема токоприемника. Электрический контакт размыкается, когда давление достигает требуемого значения. При отсутствии заданного давления контакты реле замкнуты. Требуемое значение давления устанавливается регулировочным винтом.

Для предохранения токоприемника от подъема выше допустимой величины (более 7000 мм от уровня головки рельса), на раме установлен пневмораспределитель с механическим управлением типа 338-945.
При превышении максимальной высоты подъема, рычаг нижней поперечины нижней рамы токоприемника воздействует на пневмораспределитель, который открывает проход сжатого воздуха в магистраль "С" и к реле давления Р1. 
Регуляторы давления IR2010-F02-L (IR2020-F02-L)
1, 2, 3 - мембраны; 4 - клапан; 5 - демпфер; 6 - прокладка. Прецизионный регулятор давления типа IR2010-F02-L или IR2020-F02-L с ручным управлением предназначен для понижения давления сжатого воздуха и поддержания его на заданном уровне с высокой точностью с целью регулировки контактного нажатия полоза. Регулятор типа IR2010-F02-L обеспечивает регулировку давления в пределах 0,005-0,4 МПа (0,05-4,07 кгс/см2). Регулятор типа IR2010-F02-L обеспечивает регулировку давления в пределах 0,005-0,8 МПа (0,05-8,15 кгс/см2). На заводе изготовителе, при регулировке токоприемника выставляется величина 0,18 МПа (1,83 кгс/см2). 
Регуляторы давления PR104-M-04-S01
1 - корпус; 2 - промежуточный корпус; 3 - заглушка клапана; 4 - крышка; 5 - крышка регулятора; 6 - пружина; 7 - мембрана; 8 - фильтры; 9 - уплотнения. Прецизионный регулятор давления типа PR104-M-04-S01 с ручным управлением предназначен для понижения давления сжатого воздуха и поддержания его на заданном уровне с высокой точностью. Регулятор типа PR104-M-04-S01 обеспечивает регулировку давления в пределах 0,005-0,4 МПа (0,05-4,07 кгс/см2). Регулятор работает по принципу балансировки напряжения трех мембран, что позволяет реагировать даже на малейшие изменения давления во время работы. Избыточное давление сбрасывается регулятором. Пневмоэлектрическая схема токоприемника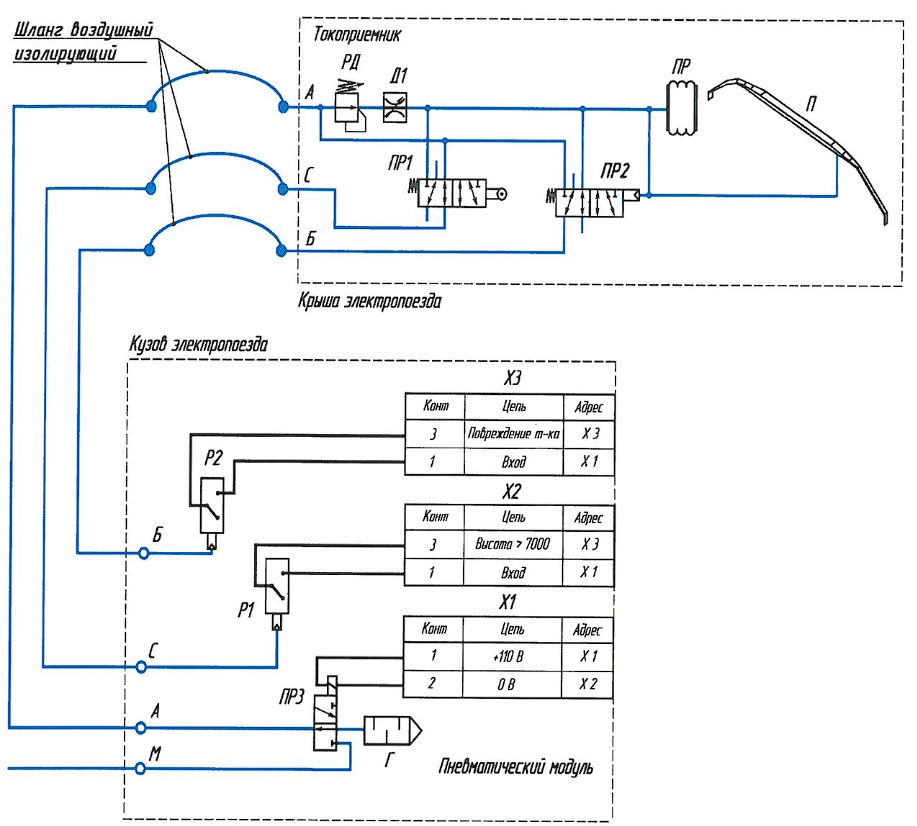
А - магистраль подвода воздуха к токоприемнику; Б - магистраль автоматического аварийного опускания; С - магистраль превышения максимальной высоты подъема токоприемника; М - магистраль питательная; П - полоз; ПР - пневморессора; РД - регулятор давления; Д1 - дроссель; ПР1-ПР3 - пневмораспределители; Р1-Р2 - реле давления; Г - глушитель; Х1-Х3 - соединители электрические.
Принцип работы токоприемника
При подаче с пульта машиниста сигнала "Поднять токоприемник" напряжение поступает на контакты разъема Х1, пневмораспределитель (ПР3) включается и открывает канал от магистрали "М" к магистрали "А". Сжатый воздух поступает на регулятор давления (РД), который понижает давление сжатого воздуха до уровня, необходимого для обеспечения статического нажатия токоприемника, а далее через дроссель (Д1) в пневморессору, которая обеспечивает подъем токоприемника. Так же воздух подходит к пневмораспределителям (ПР1 и ПР2).
Через канал пневмораспределителя (ПР1) сжатый воздух поступает в магистраль "С" и к реле давления (Р1), которое замыкает свой контакт. ПРи появлении давления в пневмоприводе токоприемника происходит переключение пневмораспределителя (ПР2) и сжатый воздух магистрали "А" поступает в магистраль "Б" к реле давления (Р2), которое, в свою очередь, замыкает контакт. В цепь управления электропоезда поступает сигнал о подъеме токоприемника. Реле давления (Р1 и Р2) имеют нормально разомкнутые контакты. При наличии давления воздуха в магистралях "Б" и "С" контакты реле замкнуты. После подачи управляющего сигнала "Опустить токоприемник" отключается питание с пневмораспределителя (ПР3), сжатый воздух из магистрали "А" и пневморессоры через глушитель выходит в атмосферу, при этом токоприемник опускается под собственным весом. При достижении полоза токоприемника высоты более 7000 мм над уровнем головки рельса, срабатывает концевой пневмораспределитель (ПР1), установленный на основании токоприемника. Через открывшийся канал пневмораспределителя сжатый воздух из магистрали "С" выходи в атмосферу. Реле давления (Р1) размыкает свой контакт, пневмораспределитель (ПР3) теряет питание и токоприемник опускается на данном вагоне. При воздействии на полоз ударных нагрузок со стороны контактной сети (при ее неисправностях) происходит разрушение калиброванного пустотелого валика в каретке токоприемника, разряжается магистраль пневмопривода токоприемника, переключается пневмораспределитель (ПР2) соединяя магистраль "Б" с атмосферой. Вследствие чего контакт реле давления (Р2) размыкается, пневмораспределитель (ПР3) теряет питание, происходит аварийное опускание токоприемников на всем электропоезде. |