|
|
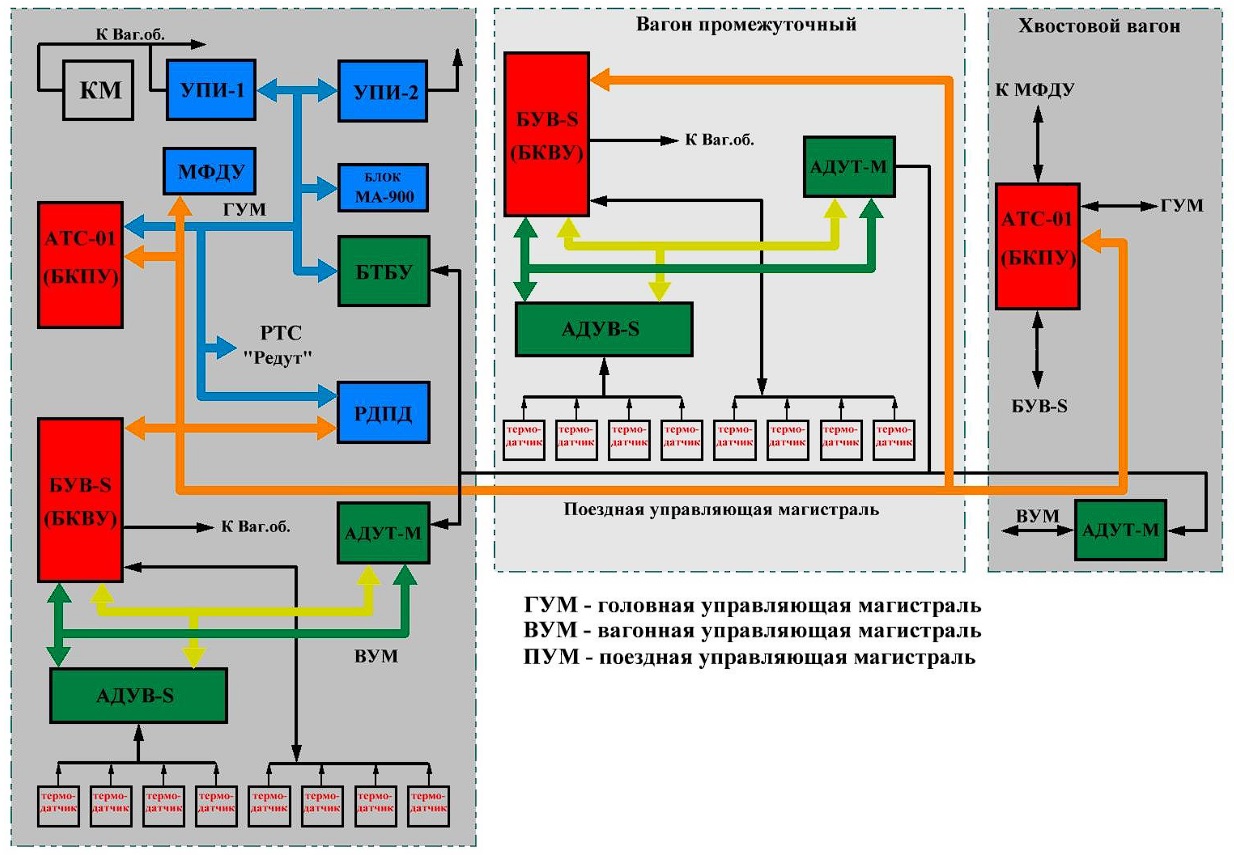
Система управления, безопасности движения и технической диагностики состава «СКИФ-М», компоненты которой установлены на вагонах 81-765, 81-766 и 81-767, предназначена для:
- управления режимами движения и вагонным оборудованием вагонов по командам машиниста; - обеспечения безопасности движения состава и перевозки пассажиров; - обеспечения технической диагностики вагонного оборудования; - обмена информацией со стационарными устройствами системы централизации, обслуживания и ремонта вагонов. Расположение блоков системы управления, функциональная схема и отображение основной информации на дисплее МФДУ представлены на рисунке 114. Элементы и блоки системы управления обеспечивают: - управление составом в ходовых и тормозных режимах (подсистемы управления тяговым приводом); - управление электропневматическим тормозом в режиме замещения и по резервным цепям управления; - управление режимом экстренного торможения; - автоматическое ограничение скорости состава по сигналам с рельсовой линии; - контроль соответствия фактической и допустимой скорости движения; - контроль готовности машиниста к выполнению мер по снижению скорости или остановки состава; - управление вспомогательным вагонным оборудованием (ПСН, климатические установки, мотор-компрессор и т.д.); - травмобезопасное открытие/закрытие дверей; - техническую диагностику и контроль технического состояния вагонного оборудования, подсистем управления подвижного состава и узлов системы; - повагонное управление вагонным оборудованием с дистанционным отключением неисправного оборудования; обмен информацией между блоками системы по поездной, головной и вагонной линиям связи; - прием информации с пульта машиниста и вывод информации на устройство отображения (монитор машиниста МФДУ) и звуковой сигнализации; - отображение информации на мониторе машиниста МФДУ о режиме управления составом, диагностической информации о состоянии вагонного оборудования вагонов состава и самой системы, выдачу сообщений машинисту о неисправностях с рекомендациями по действиям; - обмен информацией со стационарными устройствами системы централизации; - выполнение автоматических режимов остановки состава на станции; - определение местоположения состава на линии; - режим оптимального ведения состава; - диагностику коротких замыканий с тестированием датчиков КЗ и отключение потребителей при наличии короткого замыкания; - контроль нагрева букс колёсной пары; - противоюзовую защиту колесных пар при пневматическом торможении; - блокирование в закрытом состоянии дверей кабины управления во время движения в головном и хвостовом вагонах и запрета включения резервного открытия дверей в нерабочей (хвостовой кабине). Система управления состоит из следующих функциональных подсистем, обеспечивающих основные функции по управлению и контролю движения состава: - подсистема автоматической локомотивной сигнализации с автоматическим регулированием скорости (АЛС-АРС); - подсистема управления движением, работой тягового привода и электропневматическим тормозом; - подсистема управления работой вспомогательного оборудования.
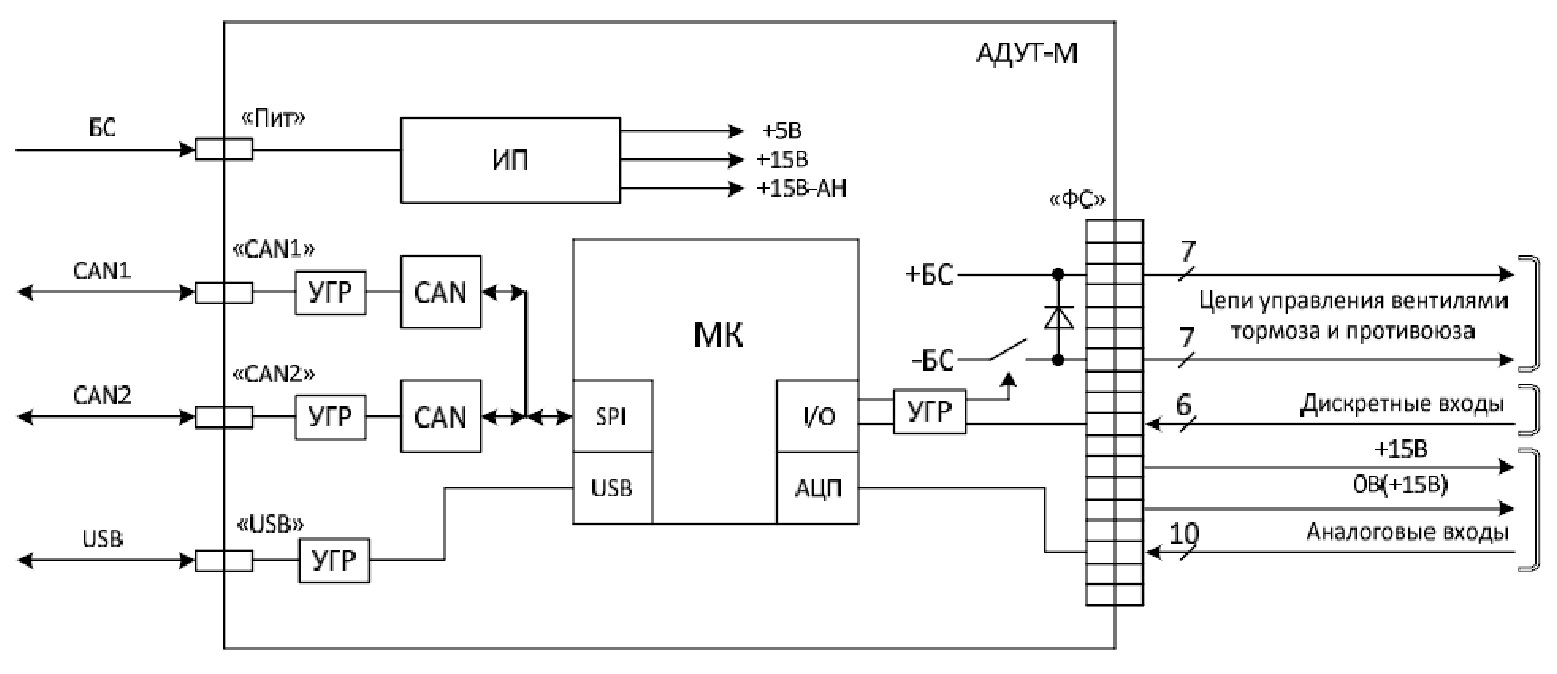
Адаптер АДУТ-М предназначен для работы в составе следующих изделий:
- Контейнер тормозного оборудования КТО-01 075; - Блок тормозного оборудования БТО 072; - Блок управления пневматическим тормозом БУПТ155 МВ; В штатном режиме работы АДУТ-М выполняет следующие функции: - Обмен информацией с головным устройством управления вагоном по интерфейсу CAN2.0; - Формирование питающих напряжений для датчиков давления; - Преобразование аналоговых сигналов от датчиков давления; - давление в тормозном цилиндре первой тележки ДД1; - давление в втором тормозном цилиндре второй тележки ДД2; - давление в тормозной магистрали ДД3. - давление в скачковой камере ДД4; - давление в авторежиме первой тележки ДД5; - давление в авторежиме второй тележки ДД6; - давление в напорной магистрали ДД7; - давление в камере стояночного тормоза ДД8; - Формирование давлений в тормозных цилиндрах системы при основном и резервном управлении; - Формирование команд управления вентилями противоюзовой защиты (кроме БУПТ); - Формирование питающего напряжения для вентилей тормоза и противоюзовой защиты; - Прием и обработку информации резервного управления торможением и петли безопасности; Задание режимов работы и поддержка полного перечня функций используемого тормозного оборудования осуществляется на уровне программного обеспечения, при неизменной аппаратной части АДУТ-М.
УГР – устройство гальванической развязки, применяется с целью повышения помехоустойчивости функционирования аппаратуры, аппаратура АДУТ-М гальванически развязана от остальной аппаратуры вагона; CAN контроллер CAN-интерфейса, организует двусторонний обмен сообщениями между устройствами; МКК – микроконтроллер. АЦП – аналого-цифровой преобразователь.
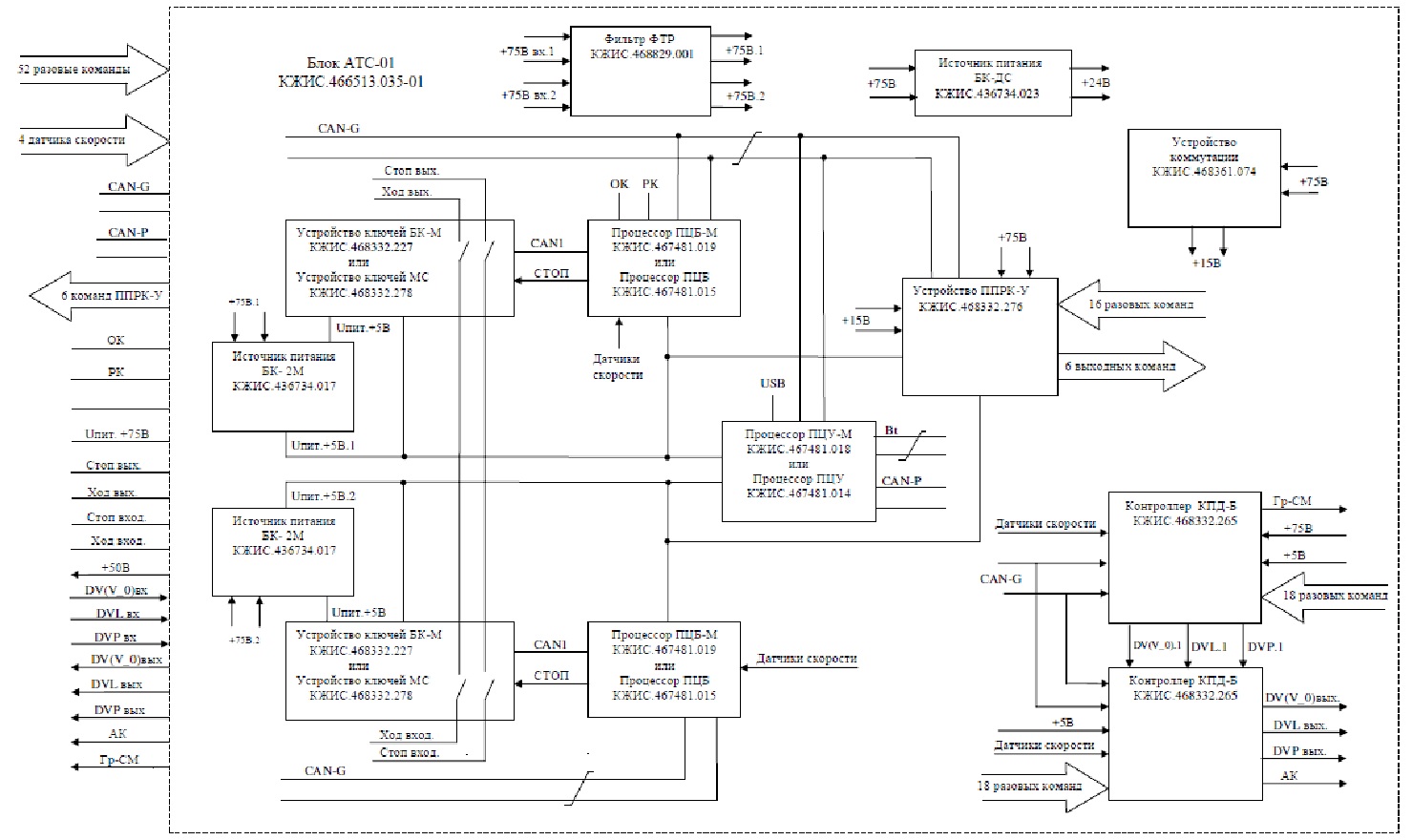
Блок АТС-01 предназначен для решения задач обеспечения безопасности движения, управления и технической диагностики подвижного состава метрополитена и устанавливается на вагонах модели 81-765 и их модификациях.
Блок выполняет следующие функции: - прием сигналов с рельсовой линии и определение допустимой и предельной скоростей; - непрерывный контроль за соответствием фактической и допустимой скоростей; - вывод информации на МФДУ (многофункциональный дисплей управления); - контроль за готовностью машиниста к выполнению мер по снижению скорости, или остановки поезда; - формирование команд на управление тяговым приводом и вагонным оборудованием; - централизованное управление вспомогательными устройствами и оборудованием вагонов; - диагностирование устройств и аппаратов оборудования вагонов с контролем безопасности движения; - ввод первоначальной информации и вывод информации на систему индикации в кабине машиниста; - прием сигналов от пульта управления и контроллера машиниста и вывод сигнализации о состоянии основного вагонного оборудования состава; - решение задач переконфигурации системы при наличии сигналов о неисправностях блоков, входящих в систему; - обмен и обработка информации с основного и вспомогательного пультов управления по головной управляющей магистрали; - обмен и обработка информации от БКВУ (блок компьютера вагонного управления) по поездной управляющей магистрали; - ведение поезда в автоматизированном режиме; - формирование команд на управление дверями с электромеханическим приводом; - формирование гальванически развязанного напряжения питания +24 В.
Блок включает в себя: - процессор ПЦБ-М (процессор безопасности) – 2 шт. – обеспечивает выполнения алгоритма функционирования системы АЛС-АРС. Аппаратно, каждое вычислительное ядро процессора ПЦБ-М принимает и обрабатывает сигнал с одной из двух приемных катушек, входные команды с пульта управления и скорость поезда, по которым осуществляет формирование команд управления движением; - процессор ПЦУ-М (процессор управления) – 2 шт. – это формирователь адресов и кодов макрокоманд, определяющих режим работы узлов и устройств блока, а так же выполняет роль центрального вычислительного и управляющего устройства; - устройство ППРК-У (устройство приема – передачи разовых команд) – 1 шт. – формирует шесть разовых команд общего назначения для управления контакторной аппаратурой вагона, принимает шестнадцать команд от дискретных датчиков, информацию о работе системы управления вагона, осуществляет обмен информацией по интерфейсу CAN-2.0B; - устройство ключей БК-М – 1 шт., (МС – 2 шт.) – формируют сигналы «Стоп» для блока БТБ и «Ход» для блока БУТП; - устройство питания БК-2М – 2 шт., – предназначен для формирования питающих напряжений для блока. Питание источника осуществляется от бортовой сети поезда метрополитена от 43В до 110В. В источнике предусмотрена встроенная защита от токов короткого замыкания и перенапряжений по выходам; - устройство питания БК-ДС – 1шт. – формирует питающее напряжение +24В для питания датчиков скорости. Питание источника осуществляется от бортовой сети поезда метрополитена от 43В до 110В. Выдает стабилизированное напряжение 24В, 0,5А. В нем имеется встроенная защита от короткого замыкания и перенапряжения на выходе; - фильтр ФТР – 1 шт. – предназначен для защиты блока от высоковольтных выбросов; - контроллер КПД-Б (контроллер положения дверей) – 2шт – формирует четыре команды для управления работой дверей, осуществляет обмен информацией по интерфейсу CAN-2.0B. Соединители для внешних связей блока находятся: - на задней стенке блока – 6 шт.; - на лицевой панели блока ППРК-М – 1 шт. Работа блока включает в себя следующие алгоритмы: - инициализации; - приема и дешифрации сигналов из рельсовой линии; - определения предупредительной и допустимой скорости; - приема входной информации; - обработки сигналов с пульта машиниста; - защиты скорости; - подтверждения стоянки при НП; - абсолютной остановки; - определения нулевой скорости и контроль скатывания; - тормоза АРС; - начального пуска системы; - управления поездной магистралью; - управления головной магистралью; - функциональной диагностики; - управления поездом в ручном режиме; - управления вагонным оборудованием; - идентификации вагонов; - подготовки информации для МФДУ; - повагонного управления; - прицельного торможения; - контроля не проезда станции; - помощи машинисту в аварийных ситуациях; - автоведения Блок АТС-01 осуществляет обмен с блоками БКВУ по головной и вагонной управляющим магистралям, реализованным на интерфейсе CAN-2.0B. Для визуальной оценки режимов работы, на лицевой панели блока расположены светодиодные индикаторы.
БУВ-S – блок управления вагоном является частью распределенной системы управления поездом, устанавливается в каждом вагоне и связан с системой посредством поездной магистрали, а также основной частью распределенной системы управления вагонным оборудованием и другими системами, объединенными последовательной вагонной магистралью.
Блок БУВ-S предназначен для сопряжения магистрали управления поездом с магистралью управления вагоном и выполняет следующие функции: - обмен информацией с блоком АТС-01 по поездной магистрали; - обмен информацией с вагонным оборудованием по вагонной магистрали; - обмен информацией с дверным оборудованием по дверной магистрали; - идентификацию вагона в составе поезда; - диагностику состояния автоматов защиты питания вагонного оборудования; - управление тормозным оборудованием и его диагностику при помощи адаптера управления тормозным оборудованием АДУТ-М; - управление и диагностику блока управления тяговым приводом БУТП; - управление и диагностику климатических установок салона и кабины машиниста; - управление и диагностику преобразователя собственных нужд ПСН; - управление и диагностику блока управления противоюзными устройствами БУПУ; - управление и диагностику блоков управления дверям БУД; - управление и диагностику освещения салона; - управление и диагностику мотор-компрессоров; - управление и диагностику токоприемниками.
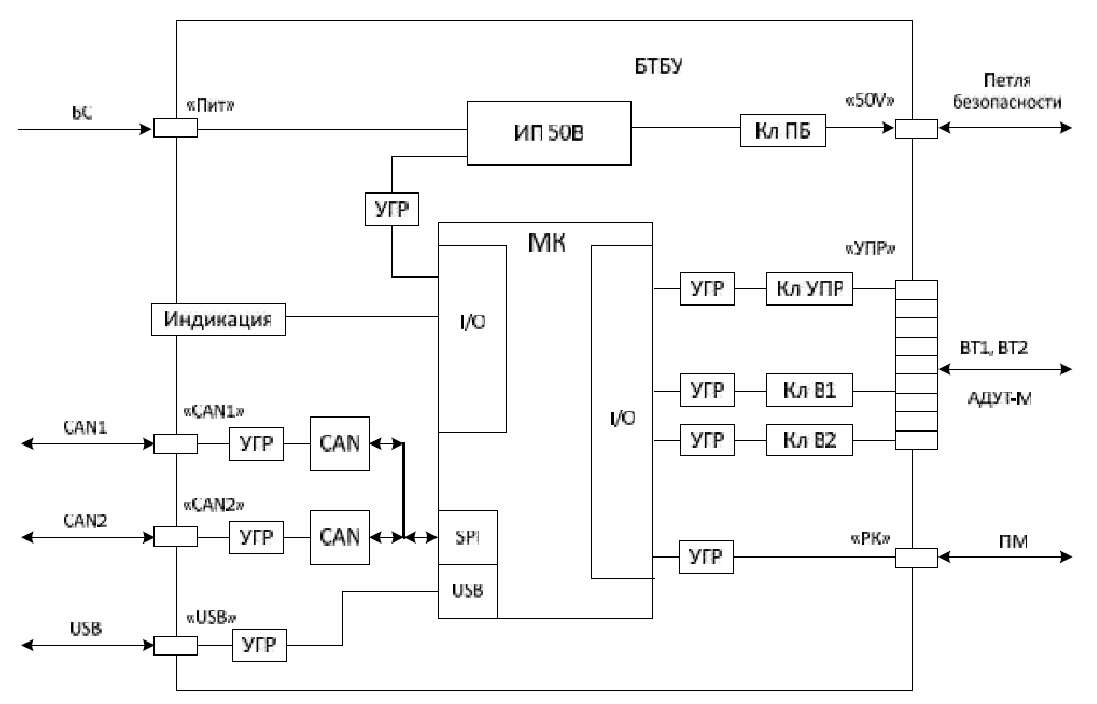
Блок БТБУ предназначен для обеспечения торможения состава метрополитена в режиме резервного и экстренного управления, а так же для контроля и диагностики состояния петли безопасности и вентилей пневмотормоза.
Блок выполняет следующие функции: - включает питание +50В, «петля безопасности»; - принимает команды управления от пульта машиниста; - включает резервное управление в каждом вагоне; - формирует напряжение управления для ВТ-1 и ВТ-2, или сигналы управления для блока АДУТ при резервном управлении; - контролирует отсутствие коротких замыканий между петлей безопасности и бортовой сетью; - контролирует ток, проходящий через петлю безопасности; - контролирует ток, проходящий через вентили ВТ-1 и ВТ-2; - передает информацию о состоянии команд с пульта машиниста (нажатие кнопок, положение контроллера), величине контролируемых токов, состоянии петли безопасности (замкнута, разомкнута, наличие замыкания), по головной магистрали CAN.
- ИП – источник питания, подает напряжение 50В для ПБ, к которой подключен БТБ; - УГР – устройство гальванической развязки – применяется с целью повышения помехоустойчивости аппаратуры; - МК – микроконтроллер; - КлПБ – условно – замкнутый электронный ключ ПБ; - КлУПР – электронный ключ, подает +75В на вентили ВТ-1 и ВТ-2, или включения резервного управления на АДУТ; - КлВ1, КлВ2 – электронные ключи, формируют сигнал 0В на вентилях ВТ-1 и ВТ-2, или признак уставки торможения на АДУТ;
Изделие устанавливается в вагонах 81-760, 81-765 и выполняет следующие функции:
– предоставление машинисту визуальной информации во всех режимах эксплуатации поезда; – управление вагонным и поездным оборудованием с помощью клавиатуры, размещенной на изделии. – предусмотрена возможность сохранения текущей информации на цифровом накопителе. Управление вагонным оборудованием осуществляется с использованием клавиатуры, размещенной по левому и нижнему краю изделия. На экране МФДУ-М отображается необходимая информация: – в режиме ручного управления поездом; – в режиме контроля поездного оборудования перед началом движения состава; – в режиме технической диагностики оборудования в процессе движения состава; – в режиме аварийных ситуаций. Блок МФДУ-М состоит из: – жидкокристаллической панели диагональю 10 дюймов; – платы носителя – процессорный модуль; – кнопочной панели; – датчика освещенности МФДУ-М крепится на раме пульта машиниста под удобным углом зрения. Кнопочная панель располагается по периметру лицевой панели. При помощи кнопок обеспечивается управление режимами индикации МФДУ-М. Датчик освещенности собирает информацию об освещенности кабины машиниста и передает ее в микроконтроллер. Далее микроконтроллер анализирует полученные данные и формирует управляющий сигнал для модулятора подсветки дисплея, который, в свою очередь, регулирует яркость ЖК панели. МФДУ-М сопрягается с бортовым компьютером поездного управления (БКПУ) последовательной двунаправленной кодовой линией. БКПУ осуществляет обработку сигналов с клавиатуры и формирование информации для отображения ее на экране МФДУ-М. Машинист может вызвать на экран информацию о состоянии поездного оборудования (токи, скорость, неисправности и др.), подавая с клавиатуры необходимые команды в БКПУ. МФДУ-М используется и для получения справочной информации о работе систем «Витязь-М» и «СКИФ-М». Информация на экране МФДУ-М отображается в цвете в виде букв (русский и латинский алфавиты), цифр, символов, графики. Цвета изображения: красный, синий, зеленый, белый, оттенки основных цветов и смешанные цвета. В изделии предусмотрена возможность звукового сопровождения выполненных команд и оповещения об обнаруженных неполадках и ошибках. Обработку полученной информации и выдачу звуковых сигналов осуществляет ПМ. Далее сигнал поступает после усиления на аналоговый выход. Также в МФДУ-М предусмотрена возможность записи звуковой информации. Звуковая информация с аналогового входа поступает в преобразователь и после преобразования записывается процессорным модулем в накопитель.
УПИ-1 выполняет следующие функции:
- принимает и обрабатывает информацию с пульта машиниста основного; - принимает и обрабатывает информацию с контроллера машиниста; - формирует управляющие воздействия на звонковую и ламповую сигнализацию и звонок по командам от БКПУ; - подает питание на контроллер машиниста; - формирует команду на отключение резервного управления дверями в хвостовом вагоне поезда.
УПИ-2 выполняет следующие функции:
- принимает и обрабатывает информацию с пульта машиниста вспомогательного; - принимает сигналы о состоянии основного и резервного реверса от БКЦУ. - формирует команды управления на вагонное оборудование.
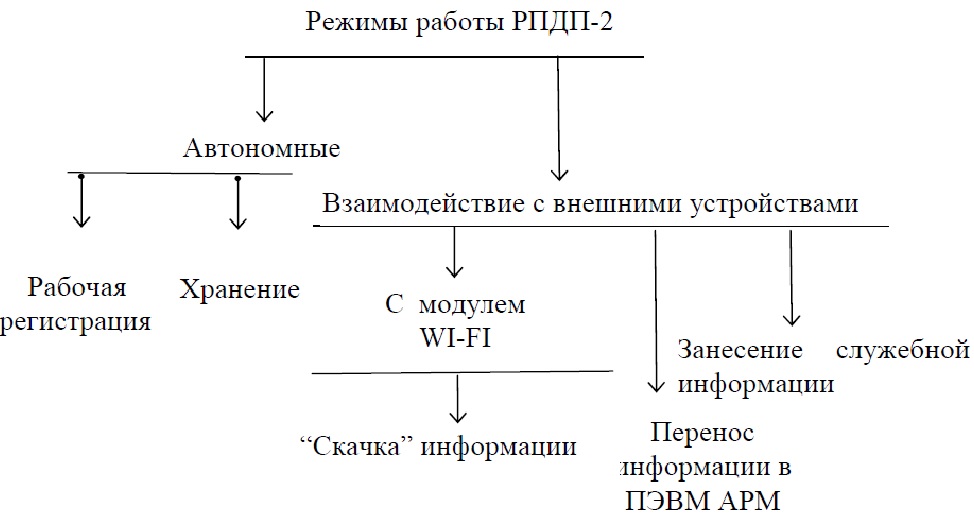
Универсальный регистратор параметров движения поезда серии 765(РПДП-2) предназначен для обеспечения объективного контроля функционирования комплексов и систем составов метро 765, а также действий машиниста.
РПДП-2 конструктивно выполнен в виде двух блоков. Собственно регистратора и блока WI-FI. РПДП-2 обеспечивает: - прием информационных массивов, поступающих по каналам CAN-2.0 линий связи; - передачу зарегистрированных информационных массивов в ПЭВМ по пяти линиям связи, (одна линия связи используется для связи с модулем WI-FI); - передачу зарегистрированных информационных массивов в ПЭВМ по другим линиям; - обработку, архивацию, запись и хранение информационных массивов и указателей информационной принадлежности во встроенную Flash - память в реальном времени поступления массивов. Объем Flash - памяти – 128 Гбайт; - формирование и запись во встроенную Flash - память информации о времени регистрации (таймер) на каждый информационный массив; - запись и хранение служебной информации во встроенную Flash - память РПДП-2, включая информацию о номере регистратора, текущей дате и т.д. Съём информации с объекта для обработки информационных массивов на ПЭВМ IBM PC осуществляется с помощью модуля WI-FI, либо любые массивы зарегистрированной информации, находящиеся во внутренней flash - памяти по любой другой штатной линии связи.
Внутренние связи системы "СКИФ-М" осуществляются по головной управляющей вагонной магистрали, поездной магистрали и по вагонным магистралям. Внутренние связи системы "СКИФ-М" отвечают требованиям стандартных интерфейсов для локальных распределенных вычислительных систем.
Связь блока АТС-01 с блоками УПИ1, УПИ2, РПДП-2, МФДУ-М, БТБУ, Моноблок МА900-19, БУ-ИК, ППУ-П, "Штурман" осуществляется по головной управляющей магистрали. В качестве линии связи головного вагона используется шина CAN-2.0 В с резервированием. АТС-01 имеет индуктивную связь с рельсовой линией для определения величины допустимой скорости движения. Связь блока АТС-01 с БУВ-S, а также АТС-01 противоположной кабины машиниста осуществляется по поездной магистрали. В качестве линии связи используется шина CAN-2.0 В с резервированием. Связь блока БУВ-S с АДУТ-М, БУТП, ПСН, БУПУ, DHS, УКВ КВМ, УКВС1, УКВС2 осуществляется по вагонной магистрали. В качестве вагонной линии связи используется шина CAN-2.0 B с резервированием. Связь блока БУВ-S c БУД осуществляется по дверной магистрали. В качестве дверной линии связи используется шина CAN-2.0 В. Взаимодействие основных составных частей системы. Для включения системы "СКИФ-М" и подготовки ее к работе необходимо осуществить ввод пароля и произвести начальную установку заводских номеров вагонов и ряда вспомогательной информации. При правильном вводе пароля и задании заводских номеров вагонов блок АТС-01 осуществляет инициализацию системы, при которой проводится идентификация вагонов (присвоение порядковых номеров блокам БУВ-S), определяется их ориентация и принадлежность к половине состава. Помимо этого осуществляется проверка исправности всех блоков системы. При успешном завершении данной операции блок АТС-01 осуществляет переход к штатному режиму. В штатном режиме управления система выполняет следующие функции: - автоматическое регулирование скорости и обеспечение безопасности движения; - техническую и функциональную диагностику вагонного оборудования и устройств вагона; - управление блоками управления тяговым приводом, вагонным оборудованием и электропневматическими тормозами; - определение местоположения состава (при соответствующем оборудовании линии).
Для выполнения указанной функции используются следующие блоки и устройства системы управления:
- блок бортовой компьютер поездного управления АТС-01; - блок бортовой компьютер вагонного управления БУВ-S; - УПИ1; - УПИ2; - АДУТ-М; - блок МФДУ-М; - блок тормоза безопасности БТБУ; - контроллер машиниста КМ; - реверсор РВ, основной и вспомогательный пульты машиниста с кнопками БАРС, АЛС, бдительности, восприятия торможения, педаль безопасности. При отключенном РВ или в режиме ввода пароля и начальной инициализации системы и проверки вагонного оборудования блок АТС-01 отключает ключи подачи питания 0 В на блок тормоза безопасности, включая экстренное торможение. Ключи подачи питания (ключи тормоза безопасности) установлены в АТС-01 и соединены последовательно. При включении РВ или по окончании режима инициализации и проверки вагонного оборудования блок АТС-01 на основе информации от блоков БУВ-S о величине давления в тормозных цилиндрах каждого вагона формирует интегральный признак “БТБ включен”, подтверждая тем самым работоспособность цепи управления БТБ. Система АЛС-АРС при получении данного признака, значении фактической скорости Vфакт & Vмин (Vмин = 1км/ч), нахождении контроллера машиниста в положении ВЫБЕГ,ТОРМОЗ или ТОРМОЗ+ и отсутствии обратных связей о замкнутом состоянии обоих ключей формируют признак измерения нулевой скорости Vо и требование включения тормоза удержания. При невыполнении одного из перечисленных выше условий система АЛС-АРС остаётся в режиме включения экстренного тормоза и запрета режима "Ход" Требование включения тормоза удержания поступает в процессор управления АТС-01, где обрабатывается и передается по поездной магистрали в блоки БУВ-S, которые осуществляют выполнение этой команды при помощи АДУТ-М. Тормозом удержания является вторая уставка электропневматического торможения. При этом блоки БУВ-S осуществляют контроль за падением давления в тормозных цилиндрах с Pмакс до Руд, а АТС-01 формирует на основе данной информации признак эффективности тормоза удержания. В дальнейшем процессоры безопасности осуществляют свою работу в зависимости от принятого сигнала с рельсовой линии о допустимой скорости Vдоп, фактической скорости поезда Vфакт, положения КМ и состояния кнопок АЛС, бдительности и педали безопасности. При нажатой кнопке АЛС система работает только в режиме автоматической локомотивной сигнализации, выводя на мониторы МФДУ-М допустимую и фактическую скорость. Формирование признака "АЛС" для перехода в данный режим осуществляется при наличии трехкратного нажатия/отжатия на кнопку АЛС. При этом время наличия и отсутствия сигнала с кнопки должно находиться в пределах (1 Ѓ} 0,5) с. При начальном включении независимо от наличия сигнала с кнопки режим АЛС отключен. Кнопка АЛС опломбирована. При отжатой кнопке АЛС система осуществляет автоматическое регулирование скорости и управление режимами торможения. Процессоры безопасности в штатной работе выполняют следующие функции: - формирование значений допустимой Vдоп и предупредительной скорости Vпред и направления движения по сигналам с рельсовой линии в режимах "2/6", "ДАУ"; - формирование значения допустимой скорости Vдоп = 80 км/ч при работе в режиме “ВП”. - формирование команды “Разрешение ходового режима” при переводе КМ в положение ХОД или ХОД+ и наборе составом скорости Vфакт > Vмин в течение заданного времени; - формирование команды "Запрет ходового режима" и "Тормоз" при отсутствии в течение заданного времени набора скорости более Vмин или несовпадении направления вращения колесной пары с положением реверсора, при этом включается режим полного служебного торможения электропневматическим тормозом без сбора схемы в режим электротормоза; - формирование команды на включение тормоза удержания при остановке поезда и формирование признака измерения нулевой скорости Vо; - формирование команды "Запрет ходового режима" при значении Vфакт = (Vдоп – d), где d =1,1 км; - формирование команды на включение режима подтормаживания ЭПТ и электротормоза с уставкой 100% и признаком "Тормоз АРС" и включение звуковой сигнализации при Vфакт > Vдоп, отключение звуковой сигнализации при нажатии машинистом на кнопку восприятия торможения; - формирование команды на включение тормоза безопасности и торможение до полной остановки при Vфакт > Vдоп и неэффективности служебного торможения или отсутствии заданного замедления (более 0,7 м/с2) в течение заданного времени (3,6 с) после включения служебного тормоза; - формирование команды "Тормоз" на полное служебное торможение до скорости состава менее 20 км/ч при нажатии на кнопку бдительности или педаль безопасности, когда Vфакт > Vдоп при Vдоп >= 40 км/ч; - формирование команды "Разрешение ходового режима" при нажатии на кнопку бдительности или педаль безопасности и переводе КМ в положение ХОД или ХОД+, когда Vдоп = 0 км/ч или имеется признак "ОЧ" или в режиме "ВП"; - формирование команды "Тормоз" на полное служебное торможение при превышении фактической скорости 20 км/ч (Vфакт > 20 км/ч) для режима движения под кнопкой бдительности или педалью безопасности; - формирование команды "Тормоз" и включение звуковой сигнализации при смене показаний допустимой скорости Vдоп = 0 км/ч на ОЧ, при этом отпускание и повторное нажатие на КБ или ПБ приведет к разрешению режима "Ход" и снятию команд на торможение; - формирование признака "Абсолютная остановка" с включением тормоза удержания при чередовании "0" / "ОЧ" с заданным интервалом (не более 2 с); - отображение на мониторе МФДУ-М допустимой, предупредительной скоростей, признака ОЧ, признаков режима работы системы АРС; - контроль остановки состава на станции. Все перечисленные команды: "Разрешение ходового режима", "Тормоз" с видом торможения (электротормоз, удержание, служебное торможение, полное служебное торможение) поступают в процессор управления АТС-01, где обрабатываются с наивысшим приоритетом по мажоритарному принципу 2 из 2 и передаются для выполнения в БУВ-S. При отсутствии эффективности данных видов торможения система АРС-АЛС формирует команду на экстренное торможение. Команда на включение тормоза безопасности исполняется выходными ключами АТС-01. Функция технической и функциональной диагностики вагонного оборудования. Для выполнения указанной функции используются все блоки, входящие в систему "СКИФ-М" и датчики вагонного оборудования.
Для выполнения указанной функции используются блоки, входящие в систему управления "СКИФ-М" и устройства вагона:
- АТС-01; - БУВ-S; - АДУТ-М; - БУД; - основной пульт управления с контроллером машиниста; - реверсор; - вспомогательный пульт управления. Формирование команд управления режимами движения поезда и вагонным оборудованием осуществляется на двух уровнях. Блок АТС-01 формирует: Первый уровень −команды на основании: - команд от системы АРС (разрешение тягового режима, запрет тягового режима, требование торможения, вид тормоза); - признаков, формируемых алгоритмом функциональной диагностики - "Двери открыты", "Экстренное торможение", "Стояночный тормоз", "Неисправность БУВ-S", "Срабатывание датчика противозажатия"; - команд управления, поступающих с реверсора, контроллера машиниста, основного и вспомогательного пультов управления; - команды повагонного управления вагонным оборудованием. Второй уровень − блоки БУВ-S формируют команды управления на основании: - команд диагностики от блока АТС-01; - признаков, формируемых алгоритмом функциональной диагностики; - сигналов с датчиков вагонного оборудования. На втором уровне реализованы следующие режимы управления: - разбор схемы управления ТП при срабатывании БВ (защиты ТП); - разбор схемы управления ТП при неисправности ТП; - разбор схемы управления ТП при наличии давления в тормозных цилиндрах (для ходового режима − Ртц ≥ 0,8 Атм, для тормозного режима − Ртц ≥ 1,5 Атм); - замещение режима электрического торможения пневматического торможением при истощении, отказе, неэффективности электротормоза. Для прицепных вагонов дополнительно реализована функция управления электропневматическим торможением при тормозном режиме. Для обеспечения трогания на подъеме в систему управления введена логика задержки отпуска тормоза удержания при переводе КМ в положение ХОД или ХОД+. При этом независимо от величины давления Ртц на БУТП будут формироваться следующие команды: - режим тяги с соответствующей уставкой; - команда "Подъем"; - режим максимальной загрузки вагона.
При включении питания и прохождении инициализации на головном вагоне режимы "ПРОСТ", "КОС", блокировки дверей включаются автоматически.
На основном экране монитора машиниста мнемознаки "ПрОст", "КОС" при включении отображаются серым цветом, при отключении – не отображаются. Для отключения режимов "ПРОСТ", "КОС" необходимо перейти в экран Автоведение нажатием на клавишу "7". Для отключения режима "ПРОСТ" / "КОС" нажать клавишу ВЫБ, затем клавишами "↑" или "↓" выбрать режим, нажать клавишу ВЫБ. Автоматический режим остановки "ПРОСТ".
При выполнении режима "ПРОСТ", после перевода ручки КМ в любое тормозное положение, управление составом от режима "ПРОСТ" отключается, и остановка поезда производится в ручном режиме, при этом мнемознак "ПрОст" отображается зеленым цветом. При переводе ручки КМ в положение ВЫБЕГ или любое ходовое положение до начала платформы управление составом от режима "ПРОСТ" возобновляется, при этом мнемознак "ПрОст" отобразится зеленым цветом и мигает. При переводе ручки КМ в положение ВЫБЕГ или любое ходовое положение на станции, управление составом от режима ПРОСТ не возобновляется, остановка поезда производится машинистом в ручном режиме. При выполнении режима "ПРОСТ" машинист имеет возможность увеличить скорость состава, переведя ручку КМ в положение ХОД/ХОД+. Далее, во время разгона состава, режим "ПРОСТ" осуществляет автоматический разбор схемы из тягового режима, если фактическая скорость превысит расчетное значение, на экране отобразится сообщение ЗАПРЕТ ТР ПРОСТ, после чего режим "ПРОСТ" возобновит прицельную остановку. В случае превышения допустимой скорости составом в процессе выполнения режима "ПРОСТ" включается торможение от системы АЛС-АРС. После снижения фактической скорости состава до допустимого значения и нажатия на кнопку КВТ, режим "ПРОСТ" продолжит остановку поезда на станции в автоматическом режиме. Автоматический режим остановки "КОС".
Если действия машиниста или режим "ПРОСТ" не обеспечивают необходимого замедления для остановки поезда на станции в пределах платформы, режим "КОС" при помощи тормоза с усилием 100% осуществляет автоматическое торможение и остановку состава в пределах станции. При этом на основном экране МФДУ-М начинает отображаться мнемознак "КОС" красного цвета. После остановки состава на станции в режиме "КОС" для его отмены необходимо перевести КМ в положение ТОРМОЗ/ТОРМОЗ+ (мнемознак "КОС" на мониторе машиниста отображается серым цветом). Блокировка дверей состава со стороны, противоположной платформе Режим осуществляет блокировку открытия дверей состава со стороны, противоположной платформе после остановки состава на станции в режимах "ПРОСТ", "КОС" или в ручном режиме. Режим активируется после проезда головного вагона над путевым датчиком местоположения поезда при любом положении КМ. При этом на экране СОСТОЯНИЕ ДВРЕЙ в строке Левые, Правые отображаются состояние блокировки дверей. Зеленый цвет индикатора является признаком разблокированного состояния пассажирских дверей состава, красный признаком заблокированного состояния пассажирских дверей по ходу движения состава. Для снятия блокировки пассажирских дверей необходимо нажать кнопку БЛОКИРОВКА ДВЕРЕЙ. Блокировка дверей состава при остановке вне зоны платформы Режим осуществляет блокировку открытия всех дверей состава, в случае остановки состава вне зоны платформы станции: на перегоне, в тупиках или на станции с погрешностью более 5,0 м относительно сигнального знака "Остановка первого вагона". Режим активируется после проезда головного вагона над путевым датчиком местоположения поезда при любом положении КМ. Для снятия блокировки пассажирских дверей необходимо нажать кнопку БЛОКИРОВКА ДВЕРЕЙ. Автоматизированное ведение поезда по перегону
Режим АВП инициализируется после считывание информации от путевого датчика в момент проезда над ним головного вагона и последующей остановки состава на станции (датчик установлен за 12 м до сигнального знака "Остановка первого вагона"). Для активации режима "АВП" необходимо перевести КМ в положение ВЫБЕГ, нажать КБ, при этом на экране мнемознак "АВП" окрашивается в зеленый цвет. При выполнении режима "АВП", после перевода ручки КМ в любое тормозное положение, управление составом от режима "АВП" отключается, и остановка поезда производится в ручном режиме, при этом мнемознак "АВП" отображается серым цветом. Действия при отказе устройств определения местоположения Если при проезде головного вагона состава над датчиком прицельной остановки на основном экране монитора машиниста мнемознак "ПрОст" не отображается зеленым цветом и не подаётся ЗВОНОК, то автоматические режимы остановки состава на станции выполняться не будут. Остановка состава на данной станции должна выполняться в ручном режиме. Возможные неисправности и способы их устранения Возможные неисправности высвечиваются на экране МФДУ-М после окончания процесса встроенного контроля. Ремонт системы и замена неисправных ячеек возможны только в депо. Ремонт неисправных ячеек возможен только в условиях завода-изготовителя или другого предприятия, обладающего соответствующими технологиями.
От четырех датчиков скорости (противоюза) головного вагона информация в аналоговом виде поступает на входы контроллеров положения дверей КПД-1 и КПД-2 блока АТС-01, по два сигнала на каждый КПД.
В КПД-1 и КПД-2 информация преобразуется в цифровой вид и поступает по CAN-шине в процессоры безопасности ПЦБ-М1 и ПЦБ-М2 блока АТС-01. Дополнительно в ПЦБ-М1 и ПЦБ-М2 поступает по одному аналоговому сигналу скорости. Каждый ПЦБ производит обработку, фильтрацию значений и усреднение отфильтрованных значений скорости по четырём значениям, полученным по CAN-шине (от КПД-1 и КПД-2) и одному значению, полученному по аналоговому каналу от датчика скорости (противоюза). Средние значения скорости от каждого ПЦБ по CAN-шине передаются в процессор управления ПЦУ блока АТС-01, который выбирает большее из полученных значений и передаёт его на монитор машиниста МФДУ-М и индикатор блока БУ-ИК. |
| eltroll2 2019-2024 |