
Цепи управления трамвая ЛМ-68
| Цепи управления трамвая ЛМ-68 |
|---|
Схема цепей управления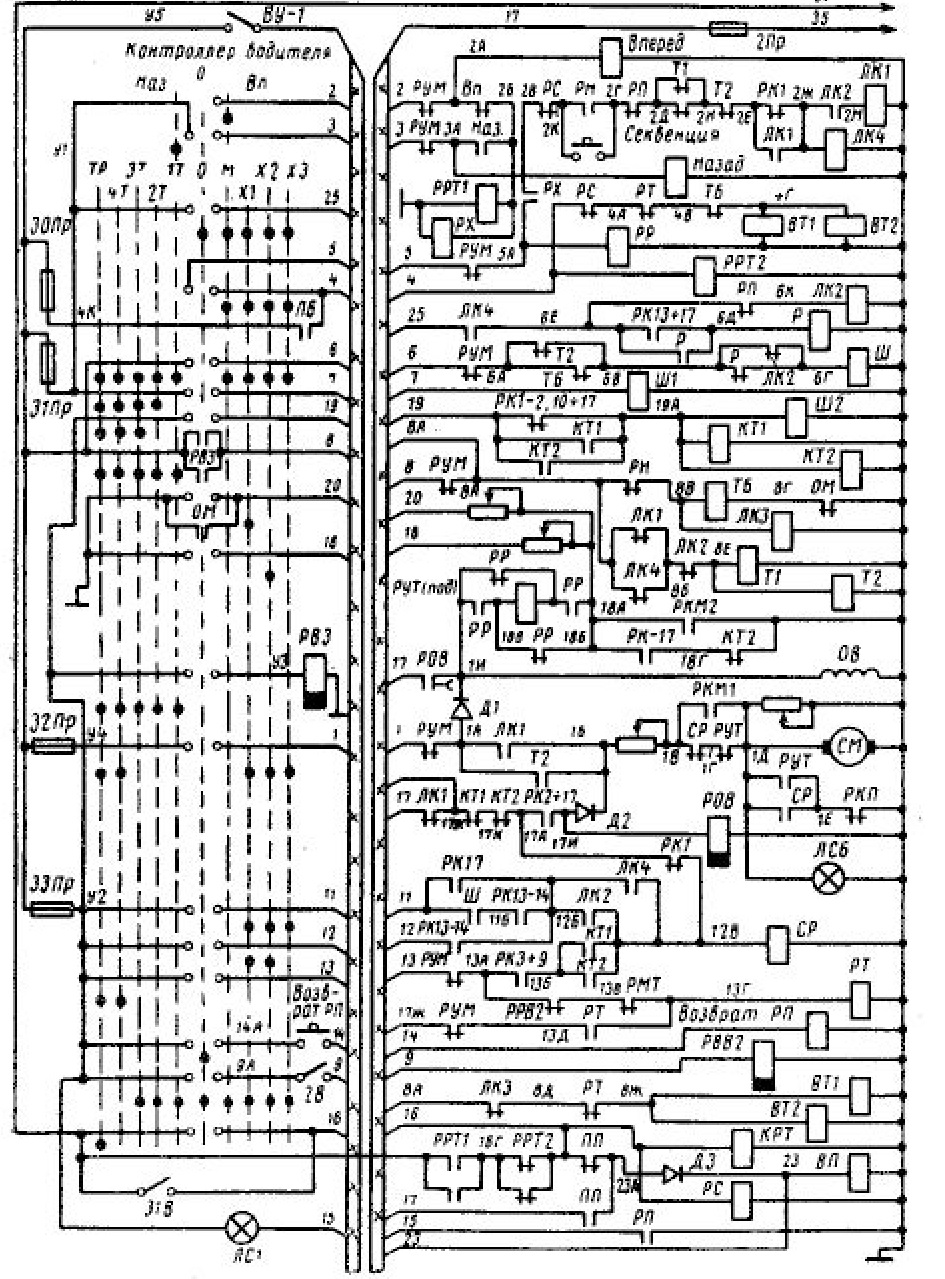
Таблица замыкания силовых контакторов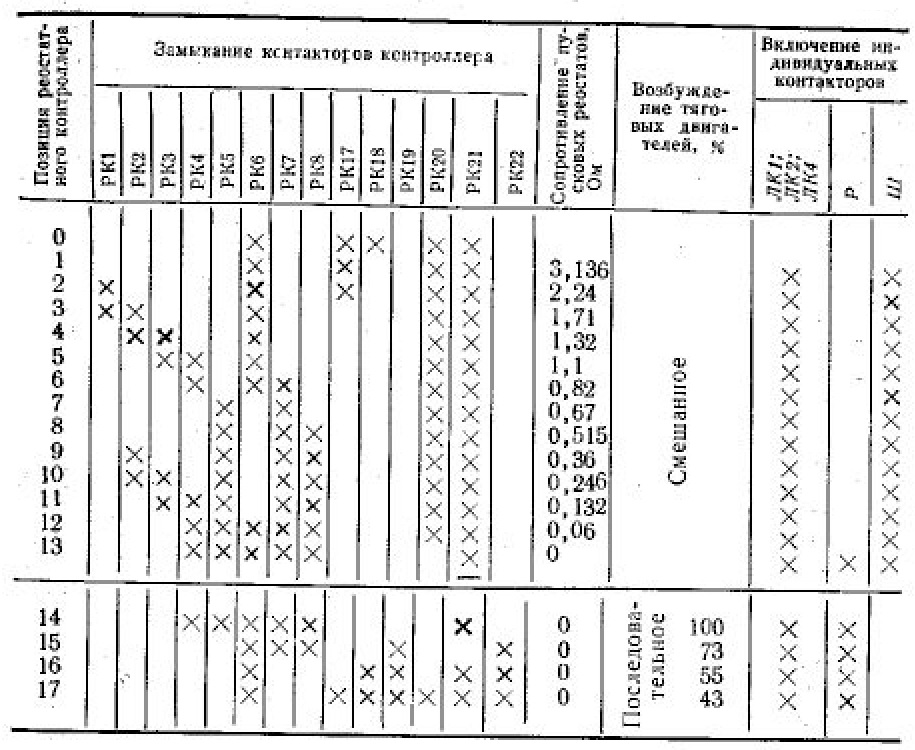

Элементы цепей управления
Система управления вагоном ЛМ-68 позволяет осуществлять эксплуатацию одиночного вагона и поезда в составе двух или нескольких вагонов по системе многих единиц. При этом управление поездом осуществляется с помощью поездных проводов (1-20, 22, 23). Вагонные провода (1-3, 5, 6, 8, 13 и 17) цепей управления присоединены к поездным через разъединитель цепей управления РУМ. Все остальные вагонные провода присоединены непосредственно к поездным. Общим требованием для цепей управления является обеспечение очередности включения и взаимодействия в работе машин и аппаратов, установленных на вагоне.
В цепи управления вагоном входят: контроллер водителя, низковольтный линейный генератор Г, аккумуляторная батарея АБ, цепи брокировочных контатков индивидуальных контакторов, блокировочных контактов индивидуальных контакторов, блокировочные контакты контакторов цепей управления групповым реостатным контроллером РК1-РК2-17, РК8-9, РК13-14, РК17 (цифры в обозначении контакторов соответствуют замкнутому состоянию контакторов на указанных позициях), реле времени РВ3, РВВ2, реле-регулятор РРТ, стоп реле РС, электропневматические вентили ВТ1 и ВТ2, ВП, ВД, реле рельсового электромагнитного тормоза РРТ2, реле хода РХ, реле напряжения РН, реле перегрузки РП, реле ускорения и торможения РУТ, реле обмотки возбуждения РОВ, реле минимального тока РМТ. Управление вагоном осуществляется контроллером водителя КВ-42Н, имеющим, кроме нулевого положения, 4 ходовых - М, Х1, Х2, Х3 и 5 тормозных положений - 1Т, 2Т, 3Т, 4Т и ТР: М - маневровый режим (скорость 5-10 км/ч); Х1 - пуск с наименьшим ускореним 0,5-0,6 м/с2 (скорость 30-40 км/ч); Х2 - пуск с ускорением 1,0 м/с2 (скорость 30-40 км/ч); Х3 - пуск с наибольшим ускорением 1,2-1,4 м/с2 (скорость 50-65 км/ч); 0 - выбег; 1Т, 2Т, 3Т - электрическое реостатное подтормаживание на уклонах и для умеьншения скорости движения вагона. При этом скорость определяется временем задержки рукоятки контроллера на положении. Наибольшее замедление 1,2 м/с2 имеет место в положении 3Т; 4Т - электрическое автоматическое реостатное торможение вагона с замедлением 1,4 м/с2 и с автоматическим наложением пневматического тормоза (при истощении электродинамического); ТР - экстренного томожение с замеделением до 4 м/с2, при котором дополнительно приводятся в действие рельсовые электромагнитные тормоза, песочницы и подвагонная сетка. Система позволяет осуществить пуск, движение и торможение при одной отключенной группе двигателей. При исчезновении напряжения в коноактной сети, перегорании предохранителя в цепи независимой обмотки возбуждения или выключении автоматического выключателя водитель оповещается об этом звуковым и световым сигналом. Вагон может быть остановлен в этом случае постановкой рукоятки контроллера в положения 1Т, 2Т, 3Т, 4Т и ТР, так как в системе предусмотрен автоматический переход на реостатное торможение с независимым питанием последовательных обмоток возбуждения от аккумуляторной батареи. Питание цепей управления
Цепи управления питаются через контактор КЦУ от линейного генератора Г. Параллельно к нему присоединена аккумуляторная батарея АБ через реле-регулятор РРТ и выключатель ручного управления 1В. При равенстве напряжений на зажимах генератора и аккумуляторной батареи питание цепей управления и всех низковольтных цепей осуществляется параллельно генератором и батареей. Если напряжение аккумуляторной батареи меньше напряжения генератора, то генератор также подзаряжает батарею. При падении напряжения генератора ниже напряжения батареи защиту ее от зарядки осуществляет реле обратного тока.
Для питания радиооборудования в аккумуляторной батарее имется отвод на 12В. Прежде чем установить контроллер водителя на одну из ходовых позиций, после поднятия токоприемника, включения автоматических выключателей АВ1 и АВ2 и выключателя аккумуляторной батареи 1В необходимо: включить двигатель генератора, двигатель компрессора, выключатели цепи управления ВУ1 и 2В, разъединитель цепи управления РУМ, нажать ногой на педаль безопасности и установить рукоятку реверсора в положение "Вперед" или "Назад". При постановке рукоятки в положение "Вперед" подается питание на провод 2 и по цепи 2, контакты разъединителя РУМ-2А включается катушка реверсора "Вперед" и реверсор переходит на заданное положение. Одновременно через контакты управления реверсора по проводу 2Б получают питание катушка реле хода РХ (контролирующее положение реверсора) и катушка реле для включения рельсовых тормозов РРТ1, подготавливающие цепь 31 - размыкающие контакты РРТ1 - 16Г - размыкающие контакты РРТ2 - 16 - катушка контакторов рельсового тормоза КРТ - катушка контактора стоп-реле СР и 0. При нажатой педали безопасности ПБ замыкаются ее контакты и по цепи 4 - размыкающие контакты - РС-4А - размыкающие контакты - РТ-4В - размыкающие контакты ТБ (для включения питания последовательных обмоток тяговых двигателей от аккумуляторной батареи)-4Г подается питание на катушки электропневматических вентилей ВТ1 и ВТ2. Одновремено по проводу 4 получает питание катушка реле рельсовых электромагнитных тормозов РРТ2. Таким образом, при сбросе педали безопасности через контактор КРТ происходит включение рельсовых тормозов. Те же цепи включаются при постановке рукоятки контроллера в положение "Назад". Питание при этом подается на провод 3 и по цепи 3 - контакты РУМ-3А включается катушка реверсора "Назад". Работа цепей управления
Маневровое положение. Из схемы видно, что при постановке рукоятки контроллера водителя в положение М напряжение подается на поездные провода 5, 6 и 25. По проводу 5 замыкается цепь контакты РУМ-5А - замыкающие контакты РХ-2В - замыкающие контакты РП-2Д - размыкающие контакты Т1-2Н размыкающие контакты Т2 - размыкающие контакты РК1-2Ж - катушка линейного контакты ЛК4. При срабатывании ЛК4 замыкаются его блок-контакты в цепи 25 - контакты ЛК4 - размыкающие контакты РП - катушка линейного контактора ЛК2. При срабатывании ЛК2 замыкаются его блок-контакты и в ранее описанной цепи по проводу 2Ж - контакты ЛК2 получает питание катушка линейнного контактора ЛК1. По проводу 6 - контакты РУМ-6А - контакты Т2-6В - контакты Р-6Г получает питание катушка контактора Ш.
После включения линейного контактора ЛК1 выключаются размыкающие блок-контакты ЛК1 и обесточивается катушка реле торможения РТ в цепи 17 - 17Ж - размыкающие контакты РУМ. Вагон растормаживается и начинает двигаться с наименьшей скоростью. Положение Х1. В положении Х1 контроллера водителя дополнительно включаются контакты и подается напряжение на провода 1, 11, 12 и 20. От провода 1 через контакты РУМ образуются две цепи. Первая замыкает обмотку возбуждения ОВ серводвигателя реостатного контроллера РК через диод Д1 и провод 1И (диод Д1 служит для исключения ложного контура замыкания э.д.с. самоиндукции катушки возбуждения серводвигателя на катушку реле СР). Вторая цепь замыкает якорь серводвигателя СМ (1А - замыкающие контакты ЛК1-1Б, регулируемый резистор сопротивления 1Ом - 1В - размыкающие контакты СР-1Г - размыкающие контакты РУТ-1Д.) Серводвигатель начинает вращать вал реостного контроллера РК, при этом замыкаются контакты силовых кулачковых контакторов и выводятся из цепи двигателей ступени пусковых реостатов. Последовательность замыкания силовых контакторов указана в таблице. Серводвигатель на позициях 1-4 вращается хронометрически, а затем под контролем реле ускорения и торможения РУТ, силовые катушки которого включены по одной в цепь двигателей 1-3 и 2-4, третья подъемная - в цепь управления. Реле отрегулировано таким образом, что при определенных значениях тока в цепи тяговых двигателей под воздействием магнитного потока силовых катушек оно срабатывает, контакты его размыкают цепь якоря серводвигателя, приводящего в движение групповой реостатный контроллер. При переходе его с одной позиции на другую силовые контакты (РК, РК2 и т.д.) выключают ступени пуско-тормозных реостатов. Ток в силовой цепи при этом увеличивается скачкообразно и под воздействием подъемной силы катушек РУТ (силовых) реле срабатывает и блок-контакты его в цепи питания якоря серводвигателя (1Г-1Д) размыкаются. Однако якорь серводвигателя при этом не останавливается между позициями, так как продолжает получать питание через замкнутый контакт контактора РКМ1. При подходе реостатного контроллера к следующей позици последовательно размыкаются контакты контакторов РКМ2 и РКМ1 и замыкается контакт контактора РКП. Якорь серводвигателя теряет питание и на короткое время останавливается, так как замыкается накоротко по цепи, образованной замыкающими контактами контактора РКП и блок-контактами реле РУТ. При этом останавливается реостатный контроллер и осуществляется его фиксация по позициям. На 13-й позиции реостатного контроллера включается контактор Р, который своими силовыми контактами шунтирует пуско-тормозные реостаты в силовой цепи и блок-контактами выключает катушку контактора Ш. На 13-й и 14-й позициях по проводам 11 и 12 получает питание стоп-реле СР по цепи 11 - замыкающие контакты контактора Ш - замыкающие контакты контакторов 13 и 14 (эта цепь зашунтирована по проводу 12 контактами контакторов 13 и 14) - замкнутые блок-контакты линейного контактора ЛК2 - провод 12В. При срабатывании стоп-реле СР замыкаются его контакты СР в цепи 1Д - замкнутые СР - размыкающие контакты контактора РКП. Якорь серводвигателя закорачивается накоротко и останавливается реостатный контроллер. Как уже было сказано, 14-я позиция является первой фиксированной ходовой позицией, на которой полностью выведены пусковые реостаты и отключены независимые обмотки возбуждения тяговых двигателей. Двигатели работают при полном возбуждении последовательных обмоток и вагон движется со скоростью 30-40 км/ч. После уменьшения тока в силовой цепи тяговых двигателей до уставки реле РУТ оно выключается и блок-контакты РУТ (1Г-1Д) замыкаются, якорь серводвигателя снова получает питание и приводит во вращение реостатный контроллер, что вызывает дальнейшее выведение ступеней пуско-тормозных реостатов. В процессе участвует также и подъемная катушка реле РУТ. Она осуществляет различные действия. При движении реостатного контроллера и переходе его с одной позиции на другую подъемная катушка РУТ на короткий промежуток времени при замыкании контактов контактора РКМ2 включается на полное напряжене цепи управления (цепь 1И - контакты реверсивного реле РР-18Б - подъемная катушка РУТ-18В - размыкающие контакты РР-18А - замкнутые контакты РКМ2). При этом подъемная катушка совместно с силовыми катушками РУТ притягивает якорь, ускоряя этим процесс срабатывания реле, и увеличивает коэффициент возврата реле. Вместе с этим, оставаясь на переходных позициях реостатного контроллера включенной через резисторы в цепях 18А-18, 18А-20, подъемная катушка снижает ток отпадания якоря РУТ в зависимости от значения вводимого сопротивления (чем мерьше сопротивление, тем больше снижается ток отпадания, и наоборот). Таким образом, подъемная катушка уже действует как регулировочная. В положении Х1 уставка реле РУТ равна около 100 А, что позволяет осуществлять пуск вагона с ускорением 0,6 м/с2 при плохом коэффициенте сцепления колесных пар с рельсами. Положение Х2. В этом положении работа цепи управления аналогична работе в положении Х1, отличие заключается в том, что ток отпадания реле РУТ увеличивается до 160А, что соответствует ускорению при пуске 1,0 м/с2. Реостатный контроллер также останавливается на 14-й позиции. Увеличение тока отпадания (уставки) реле достигается за счет подключения в цепи управления провода 18 и подключения резистора параллельно цепи подъемной катушки РУТ (цепь 18 - регулируемый резистор - 18А). ПОложение Х3. При постановке контроллера волителя в это положение размыкаются контакторы группового реостатного контроллера РК13 и РК14, вследствие чего катушка СР, ранее получавшая питание от провода 12, обесточивается. Групповой реостатный контроллер под контролем реле РУТ начинает вращаться. КОнтроллер вращается до 17-й позиции и останавливается в связи с тем, что катушка СР снова получает питание от провода 11 по цепи замкнутый контактор реостатного контроллера РК17 - замкнутый блок-контакт линейного контактора ЛК4. На позициях 14-17 реостатного контроллера, как уже было сказано, ослаблено возбуждение последовательных катушек и вагон на 17-й позиции имеет наибольшую скорость; 17-я позиция является второй фиксированной ходовой позицией. Выбег. При переводе рукоятки контроллера водителя с ходовых положений на нулевое вагон продолжает двигаться по инерции (выбег), при этом происходит выключение цепей в следующей последовательности: линейный контактор ЛК4, ЛК1 (так как провод 5 обесточивается), после размыкания блок-контактов ЛК4 в цепи 25-6Е линейный контактор ЛК2 в индивидуальный контактор Р. При необходимости быстрого перехода на тормозной режим (без выбега) линейный контактор ЛК2 выключается с контакторами ЛК4 и ЛК1, так как уже на 1-й тормозной позиции провод 25, питающий катушку линейного контактора ЛК2, обесточивается (размыкается кулачковый контактор У1-25). При постановке рукоятки контроллера водителя (с ходового положения на тормозное или наоборот) на нулевое положение реостатный контроллер должен с любой позиции, где он находился в данный момент, вернуться на 1-ю позицию. Обязательным условием для возврата является выключение линейного контактора ЛК1 и тормозных контакторов КТ1 и КТ2, так как только при выключенном линейном контакторе ЛК1 замыкается его блокировка ЛК1, обеспечивая питание СМ. Возврат группового реостатного контроллера происходит через кулачковые контакторы РК2-РК17, контакты которых еще замкнуты, так как СМ стоит не на фиксированных позициях. Обмотка якоря серводвигателя при этом получает питание по цепи 17-размыкающие блок-контакты ЛК1-17Ж - размыкающие блок-контакты КТ1-17К - размыкающие блок-контакты КТ2-17А - контакты реостатного контроллера РК2-РК17 - 17И - диод Д2 (служащий для предотвращения образования ложного контура в цепи якоря серводвигателя при эксплуатации одного вагона или поезда по системе многих единиц) - 1Б - регулируемый резистор в цепи 1Б-1В-1В - размыкающие контакты СР - размыкающие контакты РУТ - 1Д. Обмотка возбуждения серводвигателя получает питание по цепи 17 - и размыкающие контакты реле обмотки возбуждения РОВ. При возврате реостатного контроллера на позицию 1 контакты реле РОВ размыкаются с выдержкой времени после остановки якоря серводвигателя. На этой позиции замыкаются контакты реостатного контроллера РК1 и катушка СР получает питание по цепи 17 - размыкающие контакты ЛК1, КТ1, КТ2. При срабатывании СР его контакты закорачивают якорь серводвигателя, чем достигается фиксация остановки реостатного контроллера на позиции 1. Положение 1Т ручного управления. Напряжение подается на поездные провода 6, 8, У3 и 9. При этом включаются тормозные контакторы Т1 и Т2 и контактор Ш, подается питание на катушки независимого возбуждения тяговых двигателей. Они включаются вне зависимости от положения реостатного контроллера в данный момент при обязательном выключении линейных контакторов ЛК1 и ЛК2. Из схемы видно, что по проводу 6 через замкнутые контакты разъединителя цепи управления РУМ - провод 6А - размыкающие контакты контактора для включения питания последовательных обмоток возбуждения тяговых двигателей от аккумуляторной батареи во время аварийного торможения ТБ - провод 6В - размыкающие контакты ЛК2 - провод 6Г получает питание катушка контактора Ш. По проводу 8 через контакты РУМ - размыкающие контакты ЛК1 - провод 8Б - размыкающие контакты ЛК2 - провод 8Е получают питание катушки контакторов Т1, Т2. По проводу У3 получает питание реле времени РВВ2. При этом размыкаются его блок-контакты в цепи катушки реле РТ, обеспечивая постепенное накладывание (с выдержкой времени) механического тормоза с пневматическим приводом в положении 4Т. При замыкании тормозных контакторовТ1 и Т2 каждая группа двигателей включается раздельно на свои пуско-тормозные реостаты. Если к моменту начала электрического торможения реостатный контроллера находился на позициях 3-9, то контакты реостатного контроллера КТ1 и КТ2 не включаются. Серводвигатель по цепи возврата получает питание и реостатный контроллер возвращается на 1-ю позицию. На положении 1Т реостатный контроллер не вращается и остается на первой позиции. При включенном контакторе Ш в цепь независимых обмоток возбуждения тяговых двигателей введены добавочные резисторы (ослабляющие возбуждение двигателей), что обеспечивает торможение с наименьшим замедлением 0,4-0,6 м/с2. Положение 2Т ручного управления. При постановке рукоятки контроллера водителя в это положение дополнительно получает питание по проводу 7 катушка контактора Ш1. При замыкании контактов контактора Ш1 выключается резистор Р32-Р34 сопротивлением 63Ом, намагничивающая сила независимых катушек возбуждения тяговых электродвигателей возрастает, увеличивая этим самым тормозной эффект. Вал реостатного контроллера при этом не вращается. Положение 3Т ручного управления. В этом положении дополнительно получает питание провод 19, следовательно, и катушка контактора Ш2 (через замкнутые контакты контакторов реостатного контроллера РК1 и РК2). Одновременно с катушкой контактора Ш2 получают питание катушки контакторов КТ1 и КТ2, служащих для переключения цепи тормозных реостатов при возврате рукоятки контроллера в положение 1Т. Вал реостатного контроллера при этом также не вращается. При замыкании контактов контактора Ш2 выключается резистор Р34-Р33 сопротивлением 21Ом, намагничивающая сила независимых катушек возбуждения еще более возрастает, увеличивая тормозной эффект. Положения 1Т, 2Т и 3Т используют для подтормаживания на уклонах при необходимости уменьшения скорости движения вагона. Положение 4Т автоматического управления. Дополнительно получают питание провода 1 и 13. После возврата реостатного контроллера на 1-ю позицию и срабатывания контакторов КТ1 и КТ2 по проводу 1 получают питание обмотки возбуждения (провод 1 - замкнутые контакты РУМ - 1И) и якоря серводвигателя (1 - замкнутые контакты РУМ - замкнутые контакты Т2 - регулируемый резистор в цепи 1Б-1В-1В - размыкающие контакты СР-1Г - размыкающие контакты РУТ-1Д). Серводвигатель приводит во вращение вал реостатного контроллера, замыкаются контакты в соответствии с таблицей замыкания контакторов и выводятся тормозные реостаты из цепи двигателей. Вращение реостатного контроллера также происходит под контролем реле РУТ. На 8-й позиции процесс торможения заканчивается, якорь серводвигателя теряет питание и вал реостатного контроллера останавливается. Отключение от цепи серводвигателя происходит из-за срабатывания стоп-реле СР, при этом в цепи якоря серводвигателя размыкаются контакты СР и происходит закорачивание якоря (цепь: замыкающие контакты СР и размыкающие РКП). Катушка СР получает питание на позициях 8, 9 реостатного контроллера по цепи 13 - размыкающие контакты РУМ - 13А - замыкающие контакты реостатного контроллера РК8-РК9 - 13Б - замыкающие контакты контакторов КТ1 и КТ2-12В. На восьми позициях реостатного контроллера процесс торможения происходит в соответствии с пятью тормозными характеристиками. При истощении электрического тормоза и уменьшении тока якоря ниже 70А срабатывает (выключается) реле минимального тока РМТ, катушка которого включена в силовую цепь якорей тяговых двигателей 2 и 4. После срабатывания РМТ получает питание катушка РТ по проводу 13 (цепь: размыкающие контакты РУМ - размыкающие контакты РВВ2-13В - размыкающие контакты РМТ-13Г). При включении реле торможения размыкаются его контакты в цепи, питающей вентили дотормаживания ВТ1 и ВТ2 (цепь от провода 4), и приводится в действие механический тормоз с пневматическим приводом. Под воздействием электродинамического и механического с пневматическим приводом тормозов вагон затормаживается и останавливается. Реле торможения РТ остается включенным при переводе рукоятки контроллера водителя с положения 4Т на 3Т, 2Т, 1Т и 0. Растормаживание вагона осуществляется автоматически при постановке рукоякти контроллера на маневровое положение М. Положение ТР. При постановке рукоятки контроллера в положение экстренного торможения ТР дополнительно получает питание провод 16, следовательно, и контактор рельсовых тормозов КРТ и катушка реле экстренной остановки РС. Таким образом, в положении ТР в отличие от 4Т дополнительно приводится в действие рельсовый электромагнитный тормоз. Последний может быть также включен вручную при помощи выключателей 23В на пульте водителя и 31В в салоне вагона. Включение катушки реле РС дополнительно размыкает цепь питания пневматических вентилей торможения ВТ1 и ВТ2 (в цепи от провода 4), а также цепь питания катушек линейных контакторов ЛК1 и ЛК2, что обеспечивает торможение всеми тормозами. С целью избежания юза колесных пар при экстренном торможении от провода 16 получает также питание катушка вентиля песочниц ВП, при срабатывании которого на рельсы подается песок. Питание катушки ВП осуществляется по проводу 16 (цепь: размыкающие контакты контактора ПП - 23А - диод Д3-23). Диод Д3 предназначен для исключения возможности образования ложного контура при сцеплении вагонов по системе многих единиц. При ложном нажатии на втором вагоне педали ПБ и отсутствии диода Д3 происходило бы включение рельсовых электромагнитных тормозов. Работа цепей управления в аварийных режимах
Потеря водителем возможности управления поездом. В кабине водителя установлена педаль безопасности ПБ, которую во время движения поезда водитель нажимает ногой. В случае внезапного заболевания водителя и снятия ноги водителя с ПБ происходит автоматическое отключение силовых цепей и затормаживание вагона. Осуществляется это при помощи контактов ПБ, включенных к проводам 4К-4 контроллера водителя. При замыкании их снимается напряжение с 4-го и 5-го поездных проводов. Снятие напряжения с 5-го провода приводит к выключению линейных контакторов ЛК1, ЛК4. В силовых цепях контакты контакторов ЛК1, ЛК4 отключают тяговые двигатели от контактной сети. Снятие напряжения с провода 4 приводит к срабатыванию выключающих вентилей торможения вагона ВТ1 и ВТ2. При обесточенных катушках вентили ВТ1 и ВТ2 соединяют тормозные цилиндры с напорной магистралью пневмосистемы и вагон тормозится механическим тормозом с пневматическим приводом. Одновременно по 4-му проводу лишается питания катушка реле РРТ2. Выключение реле РРТ2 приводит к включению катушки конактора КРТ (цепь: 31 - замыкающие контакты РРТ1 - 16Г - размыкающие контакты РРТ2 - 16 - катушка КРТ). Включение контактора КРТ приводит к срабатыванию рельсового электромагнитного тормоза.
При последующем нажатии ногой на ПБ (главная рукоятка контроллера управления стоит при этом на ходовых положениях) вновь восстанавливается цепь питания проводов 4 и 5. По проводу 5 получают питание линейные контакторы ЛК1 и ЛК4, а по проводу 4 - катушки вентилей торможения ВТ1 и ВТ2, вследствие чего происходит растормаживание механического тормоза с пневматическим приводом с одновременным выключением рельсового электромагнитного тормоза. Вагон вновь может двинуться с места. Исчезновение напряжения в КС или перегорание предохранителя в цепи независимых обмоток возбуждения двигателей. При прекращении питания независимых обмоток возбуждения тяговых двигателей из-за отсутствия напряжения в КС или перегорания предохранителя на любой тормозной позиции контроллера тормозной эффект на вагоне не пропадает, так как происходит автоматическое переключение последовательных обмоток возбуждения тяговых двигателей на питание от аккумуляторной батареи. Двигатели работают в генераторном режиме с независимым питанием, тормозной эффект при этом получается менее эффективным. После выключения реле напряжения срабатывает индивидуальный контактор ЛК3 (катушка его получает питание по цепи: 8 - размыкающие контакты РУМ - 8А - размыкающие контакты реле напряжения РН - 8В). Одновременно по этой же цепи получает питание катушка двухполюсного контактора ТБ. После его срабатывания происходит подключение последовательных обмоток возбуждения двигателей к аккумуляторной батарее. При включенных контакторах ЛК3 и ТБ катушки вентилей ВТ1 и ВТ2 теряют питание, при этом приводится в действие механический тормоз с пневматическим приводом. Под воздействием электродинамического и механического с пневматическим приводом тормозов вагон останавливается. Переключение со служебного электродинамического торможения на аварийное происходит в момент торможения также при кратковременном исчезновении напряжения в КС из-за перерыва в питании, обрыва токоприемника, проезде изолированных спецчастей КС. При восстановлении напряжения КС электротормоз автоматически переключается с аварийного торможения на служебное. Выход из строя одного или двух тяговых двигателей одной группы. При выходе из строя одного или двух тяговых двигателей одной группы схема предусматривает работу на двух двигателях второй группы. При выходе из строя двух двигателей из разных групп вагон двигаться не будет и его следует отбуксировать в депо. В случае выхода двигателей одной группы при помощи отключателя ОМ осуществляют отключение неисправной группы. Отключатель двигателей имеет три положения: нормальное, на котором работают все четыре двигателя, и два аварийных, на которых работает одна группа двигателей 1-3 или 2-4. При работе с одной группой тяговых двигателей схема не предусматривает возможности осуществлять переход на аварийное торможение с переключением питания последовательных обмоток возбуждения от аккумуляторной батареи. Пуск и электродинамическое торможение при работе одной группы тяговых двигателей сохраняются, причем пуск осуществляют на положениях М; Х1; Х2, а торможение - на 1Т, 2Т, 3Т с переходом при низких скоростях на 4Т. |